2007年4月17日に地域新生コンソーシアム研究事業報告として、
「車載通信 CAN/LIN 通信ミドルウェアの早期リリースを開始」
「保護機能OSの実証実験を開始」
を発表いたしました。
車載通信 CAN/LIN 通信ミドルウェアの早期リリースを開始
~「自動車統合制御用組込みOS」の開発完了とオープンソース公開について~
名古屋大学大学院 情報科学研究科 組込みリアルタイム研究室 (高田・冨山研究室)と(株)ヴィッツ、 (株)サニー技研、 東海ソフト(株)、 名古屋市工業研究所、 アイシン精機 (株)、 (株)豊通エレクトロニクスらは、 トヨタ自動車(株)、 (株)東海理化電機製作所、 アイシン・エイ・ダブリュ(株)らのアドバイザ協力を得て、 「自動車統合制御用組込みOS」の研究開発事業を実施してまいりました。
この度、「自動車統合制御用組込みOS」開発成果として、自動車統合制御を容易にする保護機能OSと車載通信ミドルウェア(CAN通信、LIN通信)の開発に成功したことを報告いたします。
また、2007年4月17日より、車載通信ミドルウェア(CAN/LIN通信ミドルウェア)を、TOPPERSプロジェクトより会員限定の早期リリースを開始し、会員による評価終了後に、 一般公開する予定です。
【新聞掲載記事一覧】
{kind=link}
{kind=link}
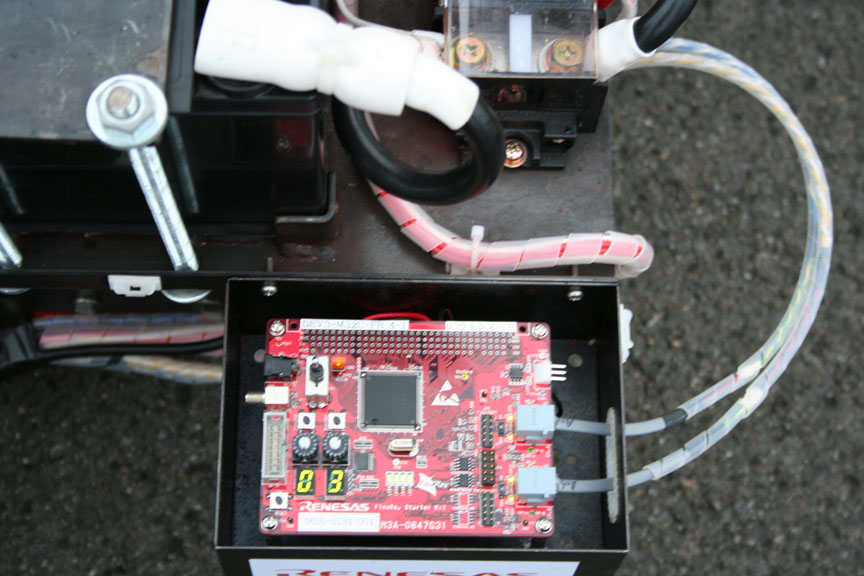
■保護機能OS、実証実験の様子
 |  |
 |  |
 |  |
 |
■研究・開発の目的・狙い
近年の自動車制御は、多くのECU (Electronic Control Unit )を用いて、相互に通信等の技術を利用して情報を交換しながらより細密な制御を実現しています。一方で、ECU 間の情報交換を担う通信技術は多様化し、自動車メーカが簡単に接続できず、接続検証に多大な工数を費やしています。また、次世代の車両制御では、現世代の 通信プロトコルを用いた通信では、データ転送量が少なく対応できないとの試算がされています。弊社は、この事実を解決するために、次世代通信として最も有 力とされているFlexRay 通信用のミドルウェアを開発し、オープンソースとして公開することにより、データ転送量や接続性を高め技術的な課題を解決するとともに、自動車制御業界へ 貢献することを目的としています。