車載通信プロトコル概要解説
車載通信プロトコルとは、車載通信で使用される通信規格のことを指し、車載通信プロトコルにはそれぞれの特徴があります。
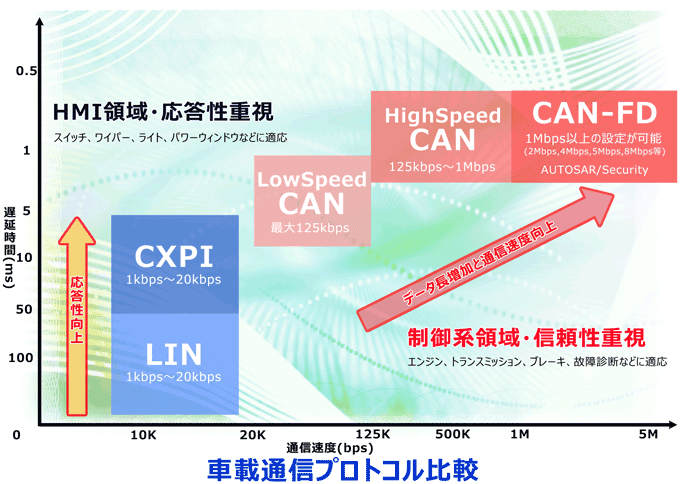
例えば、車載通信のデファクトスタンダード(標準規格)となっているCANは、通信速度が早く、信頼性が高いことからパワートレイン制御やシャシー制御、エンジンなどの動力装置の制御に使用されます。
一方CANほどの信頼性を必要としないドアミラー制御などのボディー系システムにおけるデファクトスタンダードとして普及しているLINは、CANと比較するとコストを大幅削減することが可能であり、センサやアクチュエータの制御に使用されます。
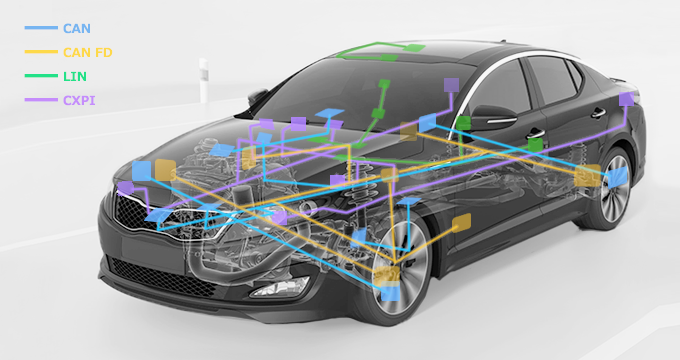
この様に自動車はそれぞれの用途や特徴に応じた通信プロトコルを使用し、複数の異なる通信プログラムは車載ネットワーク(車載LAN)で繋がることで、自動車全体で情報を共有、協調制御することによって高度な機能を実現しています。
下記より、現在主要として使われている車載通信プロトコルの概要解説ページをご覧いただけます。
-

CAN通信プロトコル概要解説
CANはISO11898で規格化され、自動車LANの標準プロトコルに位置づけられています。現在では高い性能や信頼性が認められ、FA、産業機器等、多方面でも使用されている通信規格です。
-
CAN FD通信プロトコル概要解説
CAN FD(CAN with Flexible Data Rate)とは、CAN(Classic CAN)のプロトコル仕様を拡張し、CANよりも高速通信と大容量データの送受信に対応可能な通信です。
-
LIN通信プロトコル概要解説
LINは、CANと比較して低コストのネットワーク構築を目的として策定された通信規格で、CANのサブネットワークとして普及しています。
-
CXPI通信プロトコル概要解説
CXPIは、HMI領域で増え続ける1対1で接続された機器間のワイヤーハーネス削減、多重化を目的に、日本自動車技術会で規定を策定された日本発の車載通信プロトコル規格です。
-
車載Ethernet通信プロトコル概要解説
車載Ethernetは民生や産業で使われているEthernet技術をベースに、ハーネスのコスト削減や通信のリアルタイム性、フェールセーフなどの自動車で求められる要件に対応した規格です。