2018年2月22日、2月23日に開催された「第3回 オートモーティブ・ソフトウェア・フロンティア」において、「AUTOSARでCAN通信を!〜その仕組みと留意事項〜」と題した講演を行いました。
| 名称 | 第3回 オートモーティブ・ソフトウェア・フロンティア IoT時代におけるソフトウェア技術の課題と展望 (URL:https://b-event.impress.co.jp/event/asf201802/) |
| 日時 | 2018年2月22日(木)09:30~17:50(受付開始:09:00) 2018年2月23日(金)09:30~18:30(受付開始:09:00) 展示会:10:30~17:30 |
| 会場 | 御茶ノ水ソラシティカンファレンスセンター (URL:https://solacity.jp/cc/access/) |
| 講演テーマ | AUTOSARでCAN通信を!〜その仕組みと留意事項〜 |
| 講演者 | 株式会社サニー技研 市場開拓事業部マーケティング課 山口浩史 |
| 参加料 | 無料(事前登録制) |
| 主催 | 株式会社インプレス |
| ゴールドスポンサー | 株式会社サニー技研 |
講演概要
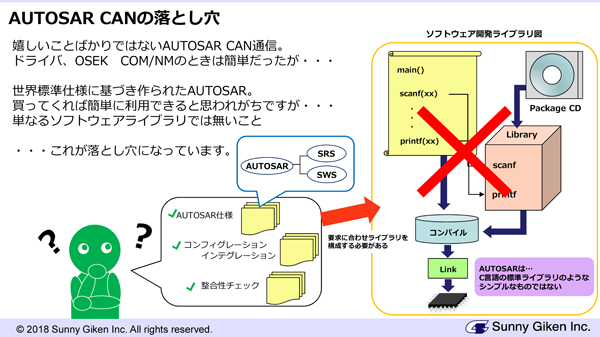
講演の中では、AUTOSARにおけるCANネットワークの扱いと、AUTOSAR CANを使う上で落とし穴に陥りやすい留意点についてお話させて頂きました。
近年、CAN通信においてAUTOSARを導入するケースが拡大していますが、AUTOSAR準拠のソフトウェア活用には利用者側であらかじめ考慮しておかないといけない留意点も多数存在しています。
標準仕様に基づき作られたAUTOSAR BSWは、買ってくれば簡単に利用できると思われがちですが、単なるライブラリでは無いということが落とし穴になっています。
AUTOSAR BSWは、AUTOSARを利用する側がどの様なモジュールをどの様な設定で使うかが決まらないと、ライブラリのようなまとまったオブジェクトになりません。CAN通信を行うにしても多数のモジュールを組み合わせたコンフィグレーションとインテグレーションというメソロジー(操作)が介入しないと利用することができない、というのが現状です。
簡単に使えそうに見えるAUTOSARもCAN通信を使うためには以下の考慮が必要です。
- 目的とするモジュールの選択と何千とあるパラメータの設定
- パラメータを知るためにはAUTOSAR仕様の理解が必要
- モジュールの組み合わせは試行錯誤がつきまとう
- CAN通信を抽象化しても、CANの通信の動きをいつも意識しておく必要がある
- 最適化のためにはマイコンやCANコントローラなどの物理層の特性を知っておく必要がある
- 性能や負荷を考慮する場合、アプリケーション、AUTOSAR BSW、ハードウェアの間でトレードオフの考慮が必要になることがある
このことからAUTOSAR導入には、AUTOSAR実装の技術と経験を持つ企業と一緒に開発を進める事が近道であるとご紹介させて頂きました。
詳細は、第3回 オートモーティブ・ソフトウェア・フロンティアの下記Webサイトをご覧ください。
https://b-event.impress.co.jp/event/asf201802/