MicroPeckerX CAN FDアナライザ製品情報
MicroPeckerX CAN FDアナライザは、CAN通信 / CAN FD通信に対応した通信アナライザツールです。小型サイズの本体に2chインターフェースを搭載し、通信モニタ、ノードシミュレーション機能搭載のGUIアプリケーションが付属します。複雑な設定不要に、すぐに使用することができます。
MicroPeckerX CAN FDアナライザとは
1.小型軽量のボディーサイズ
「開発者一人に一台のツール」をコンセプトにしているMicroPeckerXは、手のひらに収まる小型軽量の本体が特長です。
机上の使用で場所を取らず、持ち運びにも便利な大きさです。
MicroPeckerXは、本体にライセンスを登録する仕組みなので、使用するPCに制限はありません。開発室や実験室、評価場所など、様々な場所へ持ち運びして使用できます。

2.CAN / CAN FD 最大8chの同期モニタ、ノードシミュレーションが可能
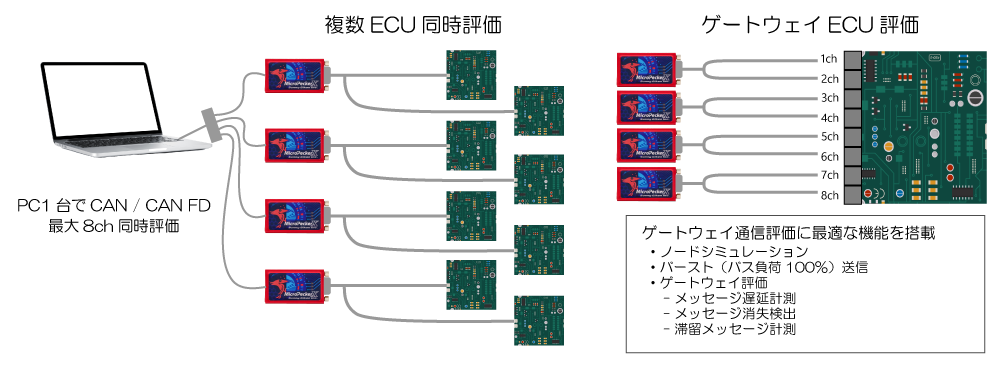
MicroPeckerX CAN FDアナライザは、本体1台で1台でCAN通信 / CAN FD通信の2ch同時モニタリングやノードシミュレーションに対応しています。CAN通信プロトコル、CAN FD通信プロトコルのモニタリングデータは、MicroPeckerX CAN FD Analyzerが自動判定。ユーザーは通信プロトコルの違いを意識せずに使用できます。
さらには必要に応じて、MicroPeckerX本体を最大4台同期することで、8chまでの同時モニタリング、ノードシミュレーションが可能です。ゲートウェイのメッセージ遅延計測などのゲートウェイ通信評価に最適な機能も搭載しています。
多チャンネル化が進むECU開発に、MicroPeckerX CAN FDアナライザは威力を発揮します。
3.ユーザー用途に応じた様々な使い方を用意
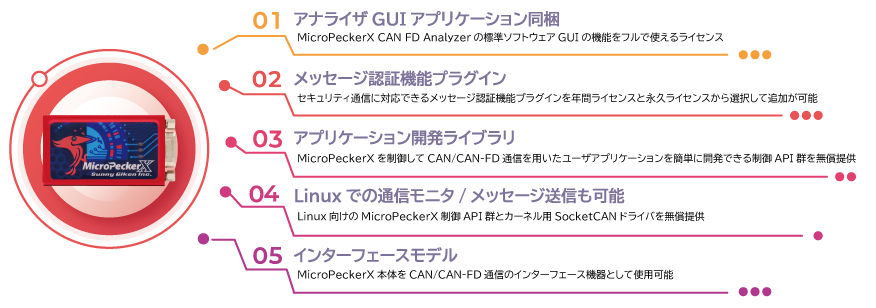
MicroPeckerX CAN FDアナライザは、ユーザーの用途に応じて様々な使い方を用意しています。
付属のGUIアプリケーションは、すぐにCAN/CAN FD通信モニタ、送信シミュレーションが可能ですが、ユーザーによっては、独自の評価ツールを作りたい、という要望もあるかと思います。そのようなユーザー向けに、MicroPeckerX制御API群のアプリケーション開発ライブラリを無償で公開しています。Linux環境も用意していますので、ぜひカスタムツール開発にご利用ください。
MicroPeckerX CAN FDアナライザ用SDKは、こちらをご覧ください。
4.セキュリティ通信に対応
自動車開発は、自動運転の実現へと進んでおり、車載制御通信には、大容量高速通信と通信の安全性確保のためのセキュリティ技術が求められています。現在、自動車の制御ECUをつなぐ車載通信はCAN通信が主流ですが、次世代車載通信規格としてCAN通信プロトコルを拡張したCAN FD通信が実車に搭載されつつあります。CAN FD通信では、CAN通信と比較してデータフィールドの最大64バイト化、通信ボーレート高速化を実現しています。
MicroPeckerX CAN FDアナライザは、追加機能の「MicroPeckerXメッセージ認証機能プラグイン(※)」を導入することで、車載通信セキュリティに対応したメッセージ認証子付きCAN / CAN FD通信モニタリング、データ送信機能へ拡張できます。
※:MicroPeckerXメッセージ認証機能プラグインのライセンスが必要です。
MicroPeckerX CAN FDアナライザ機能
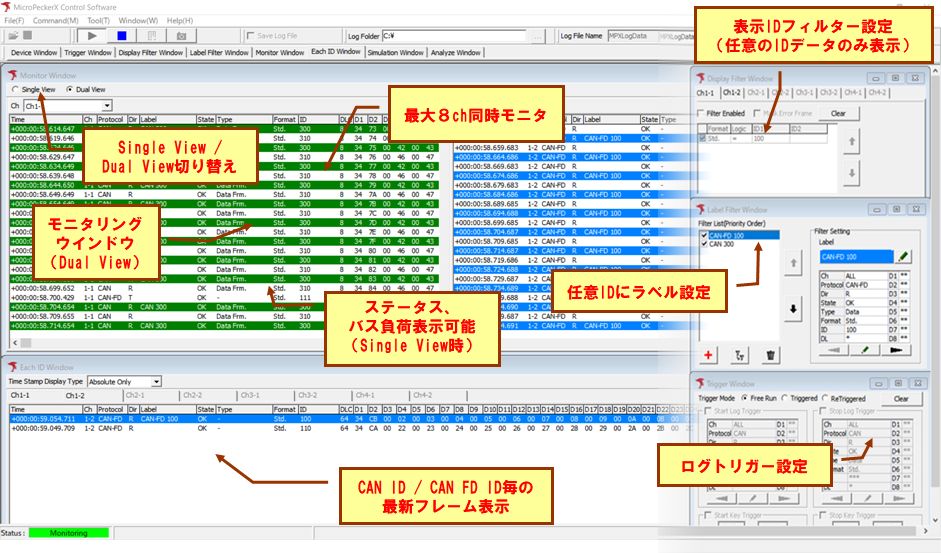
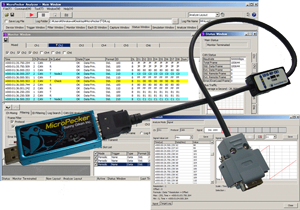
1.CAN通信、CAN FD通信モニタリング機能
CAN通信、CAN FD通信のバスデータを表示します。最大8chバスの同時モニタリングができます。
表示方法は、Single View(単Ch表示)、Dual View(2ch同時表示)切り替え可能。CAN通信プロトコル/CAN FD通信プロトコルを自動判別して表示します。
CAN ID毎に最新データを表示するEach ID機能や表示IDを絞り込むフィルター、ラベル付けなどが可能です。
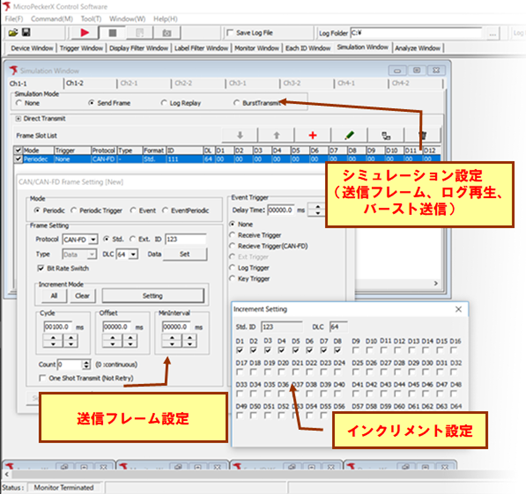
2.ノードシミュレーション機能
CAN/CAN FD通信のフレーム送信シミュレーション機能です。GUIアプリケーションから直感的な操作で送信設定が可能です。
| 機能項目 | 概要説明 |
|---|---|
送信時間の分解能 | 0.1ms |
設定フレーム数 | 28フレーム |
フレーム種別 | 周期送信、イベント送信、イベント周期送信 |
送信周期 | 1ms~60000msの範囲で設定可能(0.1ms単位) |
初回送信オフセット | 0ms~60000msの範囲で設定可能(0.1ms単位) |
送信カウント | 0~1000回の範囲で設定可能 ※0は制限なし設定 |
イベント種別 | フレーム受信トリガ、キートリガ |
イベント検出後の送信Delay | 0ms~60000msの範囲で設定可能(0.1ms単位) |
同一フレームの送信間隔保証時間 | 1ms~59999msの範囲で設定可能 |
MicroPecker CAN Analyzerと比べて、MicroPeckerX CAN FD Analyzerは、ノードシミュレーションの送信時間分解能が10倍に向上。0.1msec単位での送信時間の設定が可能になったことで、送信時間の微調整ができるようになり、高負荷状態のバス評価では、1msec送信の微調整に活用できます。
3種類のノードシミュレーション機能
様々な評価が可能な3種類のノードシミュレーション機能を備えています。
◆スロット送信モード
標準的な送信シミュレーションモードです。登録したフレームの設定に合わせてフレームの送信を実行、最大28フレームまで登録可能です。

◆ログ再生モード
最大120万レコードまでのログデータを送信フレームとして送信可能とするログ再生機能です。
読み込んだログファイルにしたがってフレームを送信です。

◆バースト転送モード
1フレームまたはログ再生による連続送信でバス負荷100%の状態を構築するバースト転送機能です。

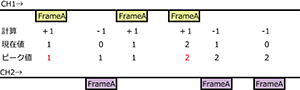
3.ゲートウェイ解析機能
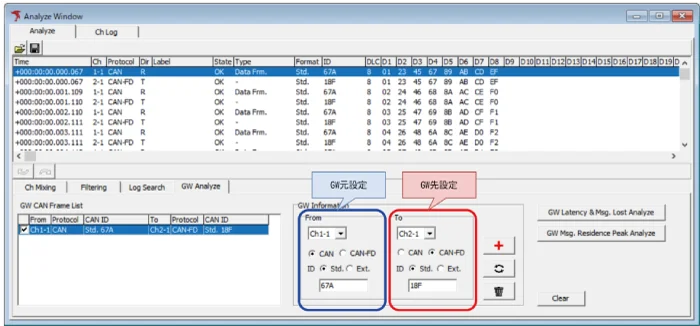
◆ゲートウェイ遅延計測
◆ゲートウェイメッセージ消失解析
◆ゲートウェイ滞留解析
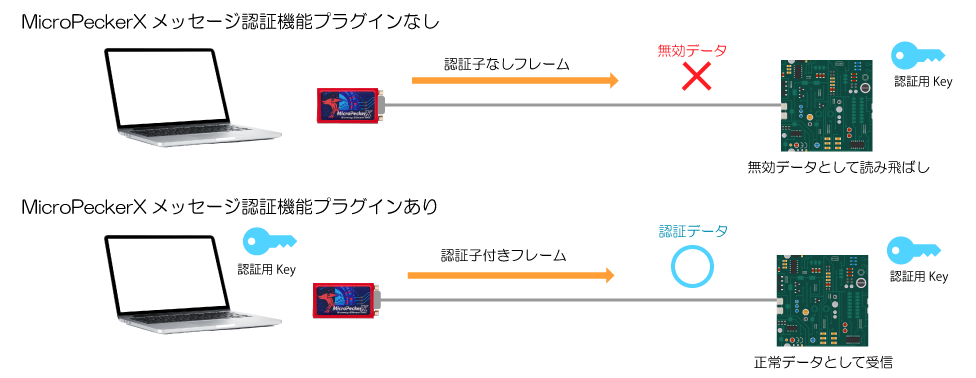
4.通信セキュリティ評価(オプションライセンス)
◆MicroPeckerX メッセージ認証機能プラグイン
MicroPeckerXメッセージ認証機能プラグインは、MicroPeckerX CAN FDアナライザのアプリケーションに、セキュリティ通信のメッセージ認証機能を追加するプラグインです。
メッセージ認証子(MAC)付きCAN通信 / CAN FD通信データのモニタリングを可能にし、MAC、FV、ペイロードに分割表示のほか、MAC, FV検証機能により、メッセージ認証に対応した通信デバッグを可能にします。
MicroPeckerX メッセージ認証機能プラグインは、ライセンスを追加することで使用することが可能になります。
MicroPeckerX メッセージ認証機能プラグインの詳細は、製品ページをご覧ください。
CANアナライザ比較
MicroPecker CANアナライザとMicroPeckerX CAN FDアナライザとの比較表です。
MicroPeckerX CAN FDアナライザは、MicroPecker CANアナライザの後継機種となります。
MicroPecker CANアナライザ
《S810-MP-A1》
MicroPeckerX CAN FDアナライザ
《S810-MX-FD2》
| 機能比較 | MicroPecker CANアナライザ 《S810-MP-A1》 | MicroPeckerX CAN FDアナライザ 《S810-MX-FD2》 |
|---|---|---|
対応プロトコル | CAN通信 | CAN通信 / CAN FD通信 |
対応ch数(本体1台) | 1ch(最大6ch対応、本体6台) | 2ch(最大8ch対応、本体4台) |
製品同梱品(※1) | MicroPecker本体、専用CANケーブル、同期ケーブル、USB延長ケーブル | MicroPeckerX本体、同期ケーブル、USB(microB)ケーブル (CANケーブルは別売り) |
機能拡張オプション | RAMモニタ、LINアナライザ切替可能(別途ライセンス追加必要) | 通信セキュリティ(メッセージ認証機能プラグイン)機能追加、および、InstaGW(CAN-CAN FDプロトコル変換ツール)切替可能(別途ライセンス追加必要) |
アプリケーション開発ライブラリ(※2) | Windows 64bit版 | Windows 64bit版、Linux版、Linux用SocketCANドライバ |
※1:アプリケーション、ユーザーズマニュアルは、Webサイトからのダウンロード提供となります。
※2:Webサイトからの無償ダウンロード提供となります。
製品仕様
製品パッケージ
| 項目 | 内容 |
|---|---|
製品名 | MicroPeckerX CAN FDアナライザ |
製品型名 [*1] | S810-MX-FD2 |
同梱品 [*2][*3] | ・MicroPeckerX本体 ・USB(microB)ケーブル ・同期ケーブル ・保証書兼解説書 (MicoPeckerX CAN FDアナライザライセンス) |

[*2]:アプリケーションソフトウェア、ユーザーズマニュアルはWebページからダウンロードとなります。
[*3]:CANケーブルは同梱していません。別売りとなります。
MicroPeckerX CAN FDアナライザ 機能仕様一覧
| 項目 | 内容 | |
|---|---|---|
CAN / CAN FDインターフェース | 2ch | |
対応チャンネル数 | 2ch/1台、最大8ch(本体4台)までの同時接続可能 | |
マルチチャンネル同期機能 | モニタタイムスタンプ同期 | 最大8ch(本体4台)間のモニタデータ時刻同期 |
シミュレーション送信タイミング同期 | 最大8ch(本体4台)間のシミュレーション時刻同期 | |
ログ再生送信タイミング同期 | 対応 | |
通信設定 | プロトコル | CAN / CAN FD 選択可能 |
通信ボーレート:アービトレーションフェーズ | 以下の4種類が選択可能 125kbps / 250kbps / 500kbps / 1Mbps | |
通信ボーレート:データフェーズ | 以下の5種類が選択可能 125kbps / 250kbps / 500kbps / 1Mbps / 2Mbps / 5Mbps ※アービトレーションフェーズで125kbpsを選択した場合は500kbpsに補正 | |
サンプルポイント | 以下の6種類が選択可能 60%/65%/70%/75%/80%/85% ※通信ボーレート:データフェーズで5Mbpsを設定した場合は75%に補正 | |
終端抵抗 | 有効/無効 選択可能 | |
モニタ機能 | タイムスタンプ分解 | 1μs |
ロギング可能容量 | ロギング先のディスクの容量に依存 | |
トリガモード | フリーラン、開始トリガ、終了トリガ | |
トリガ条件 | 指定ログ検出、キー入力 | |
ロギング出力先 | ファイル、ハードディスク内 | |
ロギング書式 | テキスト形式(CSV)、16進数出力 | |
シミュレーション送信機能 | 送信時間の分解能 | 0.1ms |
送信時間の保証精度 | 0.2ms | |
設定フレーム数 | 28フレーム | |
フレーム種別 | 周期送信、イベント送信、イベント周期送信 | |
送信周期 | 0.1ms~60000msの範囲で設定可能(0.1ms単位) | |
初回送信オフセット | 0ms~60000msの範囲で設定可能(0.1ms単位) | |
送信カウント | 0~60000回の範囲で設定可能
※0は制限なし設定 | |
イベント種別 | フレーム受信トリガ、キートリガ | |
イベント検出後の送信Delay | 0ms~60000msの範囲で設定可能(0.1ms単位) | |
同一フレームの送信間隔保証時間 | 0.1ms~59999msの範囲で設定可能 | |
ログ再生送信機能 | 送信時間の分解能 | 0.1ms |
送信時間の保証精度 | 0.2ms | |
先頭フレーム送信オフセット | 0.1ms~60000msの範囲で設定可能 | |
ログ再生開始タイミング | モニタ開始直後、フレーム受信トリガ、ログトリガ、キートリガ | |
転送モード | ループあり/なし | |
対応チャンネル数 | 最大4ch(1デバイスにつき1ch) | |
バースト転送機能 | 1フレーム送信 | 対応 |
ログバースト送信 | 対応 | |
転送開始タイミング | モニタ開始直後、フレーム受信トリガ、ログトリガ、キートリガ | |
転送モード | ループあり/なし | |
対応チャンネル数 | 1ch | |
ログ解析機能 | ゲートウェイ遅延解析 | ゲートウェイ対象フレームのゲートウェイ遅延時間を計測 |
ゲートウェイメッセージ消失検出 | ゲートウェイで消失したメッセージの検出 | |
ゲートウェイ滞留数ピーク値解析 | ゲートウェイ対象フレームをゲートウエイ側で保留したピーク値を計測 | |
フレーム周期解析 | 特定CAN IDのフレーム周期を計測(Max,Min,Avarage) | |
設定情報の保存と読み出し | xml形式で保存 | |
MicroPeckerとのタイムスタンプ同期 | MicroPecker RAMモニタ、LINアナライザ、CANアナライザとのモニタデータ時刻同期に対応 | |
ハードウェア仕様
MicroPeckerX本体仕様

| 項目 | 内容 | |
|---|---|---|
ホストインターフェース | USB 2.0 High Speed(480Mbps) | |
ホスト動作環境[*1] | PC | IBM PC/AT互換機 |
OS[*2] | Windows 11(64bit), 10(64bit), 8.1(64bit) | |
CPU | Intel社製またはAMD社製のx86プロセッサ(Core i5/Ryzen5以上推奨 | |
ハードディスク | 10Gbyte以上の空き容量[*3] | |
メモリ | 8Gbyte以上を推奨 | |
USBポート | USB2.0(High Speed)対応で、接続するMicroPeckerX本体の台数分必要[*4] | |
画面解像度 | 1920×1080以上を推奨 | |
その他 | モニタ、キーボード、マウス | |
電源 | USB Bus Power(5V、300mA) | |
寸法[*5] | 65(W)×35(D)×16(H)mm | |
重量 | 45g | |
[*2]:仮想環境での動作は未サポートです。
[*3]:長時間のモニタリングをする場合は、十分なハードディスクの空き容量を確保してください。
[*4]:外付けのUSBハブを用いて接続する場合は、必ずセルフパワー対応機器を選定いただき、外部より電源を供給した上で接続ください。USBハブをバスパワー駆動で接続した場合、動作しない、または不安定になることがあります。
[*5]:寸法には、接続端子の突起部は含まれておりません。
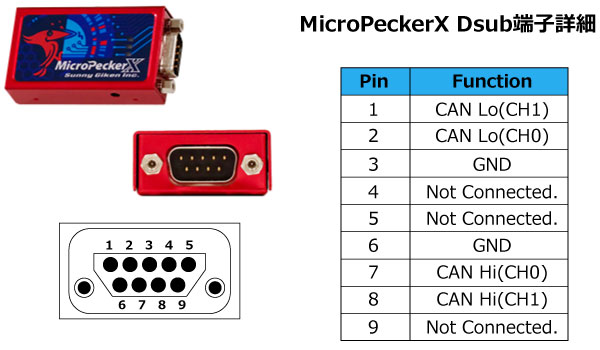
Dsub端子仕様
MicroPeckerX 本体・Dsubコネクタ
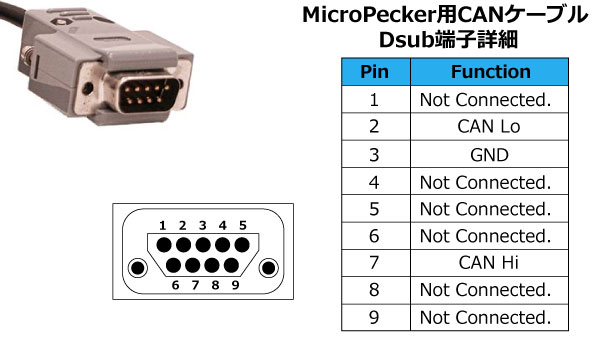
CAN 1chクリップケーブル端子
※CANケーブルは別売りです。
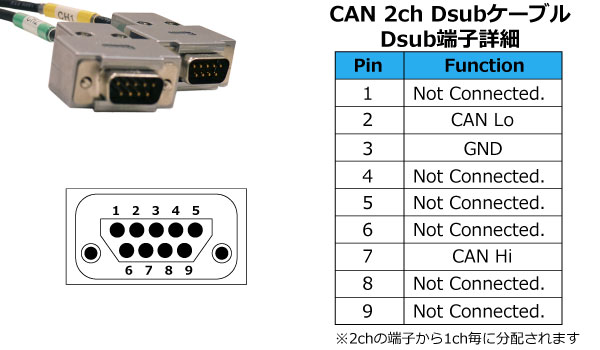
CAN 2ch Dsubケーブル端子
※CANケーブルは別売りです。
オプション製品ラインナップ
CAN/CAN FDツール
MicroPecker CAN FDアナライザ《S810-MX-FD2》は、CANケーブルは付属していません。必要の場合は、ご一緒にご購入ください。
MicroPeckerX メッセージ認証機能プラグイン
《S810-MX-PM1》
MicroPeckerX CAN FDアナライザのアプリケーションにメッセージ認証機能を追加するプラグインのライセンス。
CAN 1ch クリップケーブル
《S810-MX-CB1》
Dsub9Pinコネクタ変換ICクリップ型のCANケーブル。MicroPeckerX CAN FD AnalyzerやMicroPecker CAN Analyzerで使用可能。
CAN 2ch DSubケーブル
《S810-MX-CB2》
2ch分岐型のDsubCANケーブル。MicroPeckerX CAN FD AnalyzerやMicroPeckerX InstaGWで使用可能。
MicroPeckerX CAN FDアナライザ用SDK
MicroPeckerXをインターフェイスとしてユーザーオリジナルのアプリケーション開発が可能です。アプリケーション開発ライブラリはWebサイトから無償ダウンロードできます。CAN通信、CAN FD通信を使ったユーザー独自評価ツールや評価環境の構築にご利用できます。


お見積書のご依頼
MicroPeckerX CAN FDアナライザの御見積書のご依頼は、以下のメールフォームからお申込みください。
MicroPeckerX CAN FDアナライザのレンタルをご希望の場合は、以下のメールフォームから御見積書をご依頼ください。