車載Ethernetとは
車載Ethernetとは、自動車の車載ネットワークに適した規格によるEthernet通信技術です。
民生や産業で使われているEthernet技術をベースに、2ペアケーブルの採用によるハーネスのコスト削減や通信のリアルタイム性、フェールセーフなどの自動車で求められる要件に対応しています。
車載Ethernetは、故障診断用の通信インターフェースとして、一般的なEthernet規格である100BASE-TXを使用したのが始まりです。ECUの高機能化に伴い、CAN通信による故障診断や適合時のデータ転送時間は増大を続けています。その時間を短縮することを目的にEthernetが車載通信に導入されました。
100BASE-TXの場合、100Mbpsのデータ伝送速度で最大1500byteのペイロードを持つメッセージを送受信できます。ただ、このときは、使用するEthernet用デバイスの動作温度保証を-40℃~85℃に上げるなど、自動車に応用する上での環境特性に対応する変更を行うだけでした。
その後、車載Ethernetは、民生・産業用製品の通信インターフェースとは異なる発展を続けています。
自動運転レベル3を実現するべく、高解像度カメラによる周辺監視および車載レーダーやLiDARなどの高度センシング技術によるADAS搭載のために、100BASE-TXの課題である配策の自由度がないという点とEMCノイズ対策費用にコストがかかるという問題を解決した100BASE-T1が車載Ethernetの中心規格になっています。
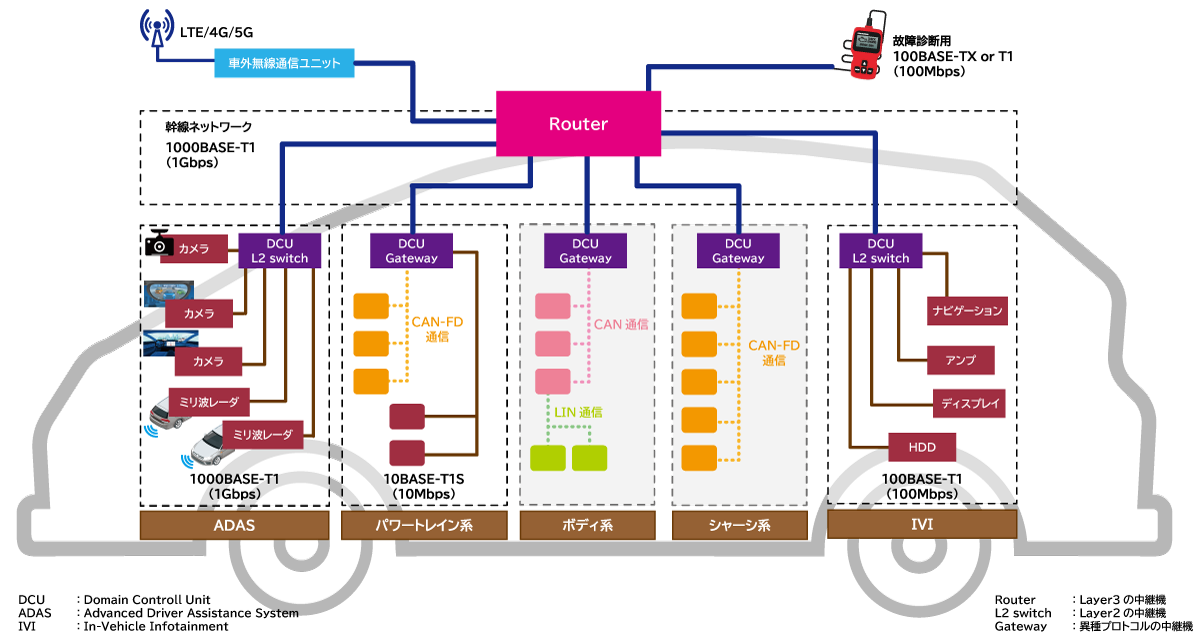
下図は、自動運転レベル2相当の車載ネットワークの構成例です。
現在、Ethernetは限定的なネットワークへの適用に留まっていますが、今後、技術の確立とコスト低減が進めば、車載Ethernetの利用が進むと見込まれています。
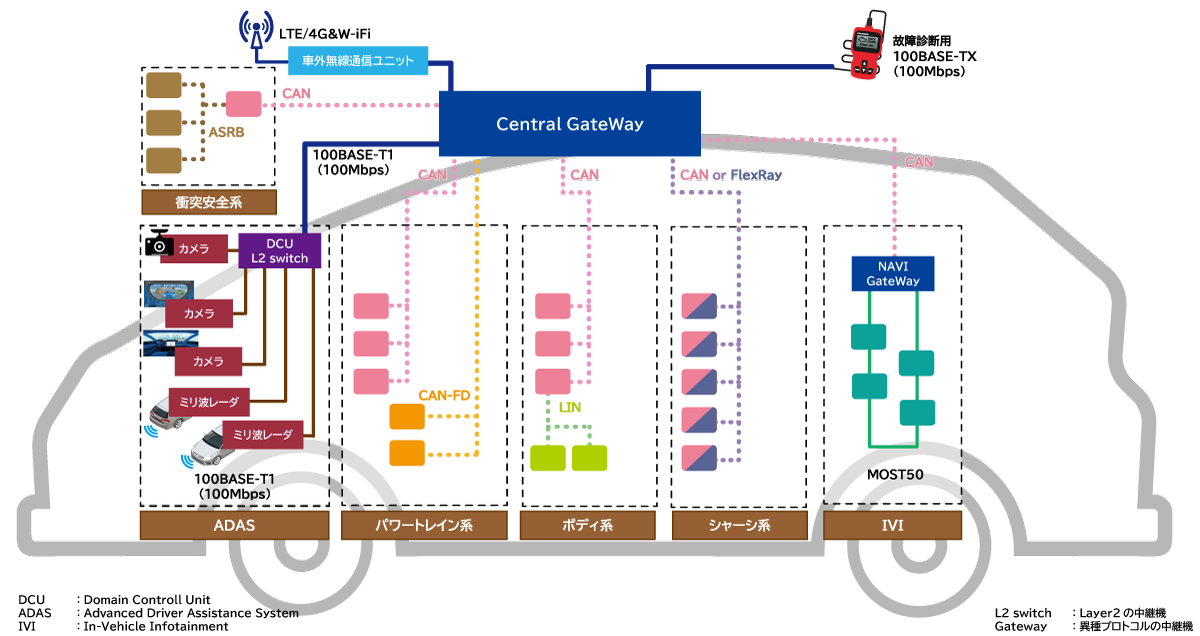
車載ネットワークの構成例
車載Ethernet 100BASE-T1の特長と民生Ethernet 100BASE-TXとの違い
車載Ethernetは我々が家庭やオフィスなどで使用している民生Ethernetを車載向けに最適化したものです。
自動車へEthernetの導入を試みたところ、民生向けの100BASE-TXの規格にはいくつかの課題がありました。
- 動作電源電圧範囲や、動作温度補償範囲が狭いこと
- 水晶発振子精度の許容値が狭いこと
- ノイズが発生しやすく外部からの干渉を受けやすいこと
- Sleep時の待機電流が大きいこと
- 既存Ethernet規格のPHYではEthernet通信によるウェイクアップ機能がないこと
- リンクアップタイムが遅いこと
- Ethernet上位層の課題として、時刻同期精度の荒さ、使用メモリの容量、CPUの負荷が重いこと
また、従来のEthernetケーブルは、2本のツイストペア線を樹脂で保護した形が一般的で、約9mmの太さがあります。
自動車内の配線用の空間は限られており、既存のEthernetケーブルを使った配線は不可能とされていました。
そこでこれらの技術課題を解決するため、Broadcom社がシールドなしの1本のツイストペア線で100Mbpsの双方向データ伝送を実現するBroadR-Reachと呼ぶ物理層技術を開発すると、半導体メーカーなどと共同で、車載EthernetやBroadR-Reachの普及を目的とした非営利団体のOPEN Allianceを立ち上げました。
このOPEN Alliance BroadR-Reach(OABR)を元に、IEEEが100BASE-T1として標準規格にしました。
これにより、OABRは、車載Ethernetの物理層における事実上の標準となっています。
車載Ethernet規格100BASE-T1と民生Ethernet規格100BASE-TXとの比較は以下の通りです。
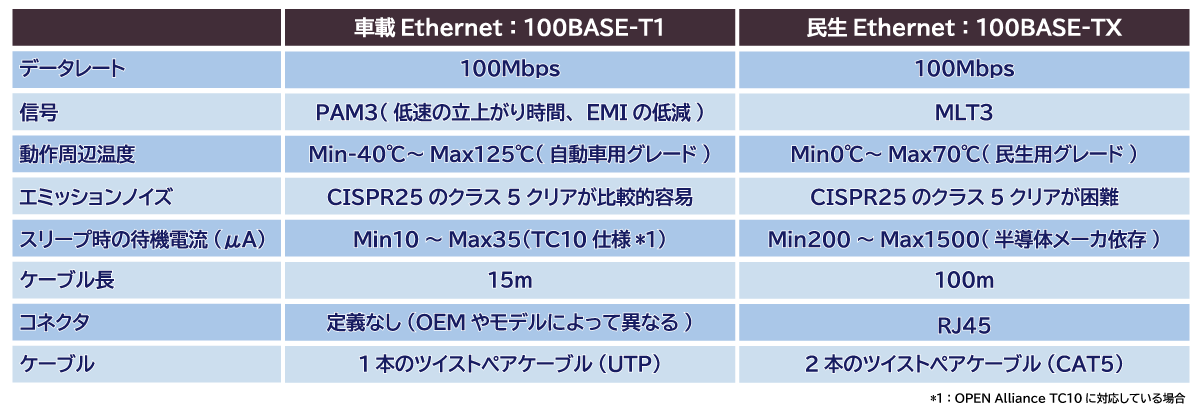
100BASE-T1と100BASE-TXの比較
車載Ethernet規格
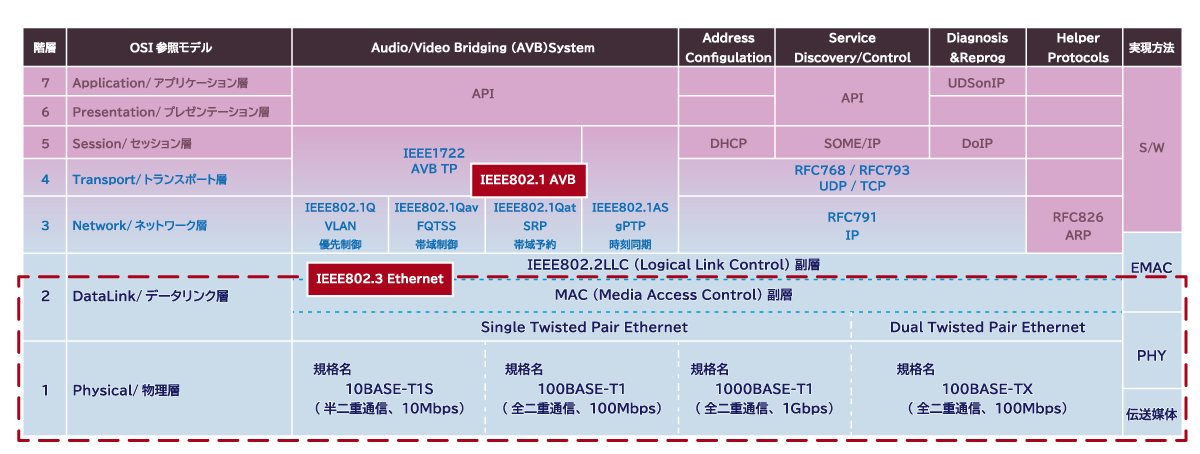
車載Ethernetは、自動車で応用する場合の環境特性や使用条件を踏まえ、IEEE802.3のワーキンググループとOPEN AllianceのTC10というテクニカルコミュニティで、主にEthernetのトランシーバであるPHY(ceiver)に実装するデータリンク層と物理層の標準化が現在も行われています。
車載Ethernetの規格化の状況を下図に示します。実線で囲んだ規格は、すでに策定されて公開されたものです。
点線で囲んだ規格に関しては、2022年現在、策定中もしくは策定されるであろう規格を記載しています。
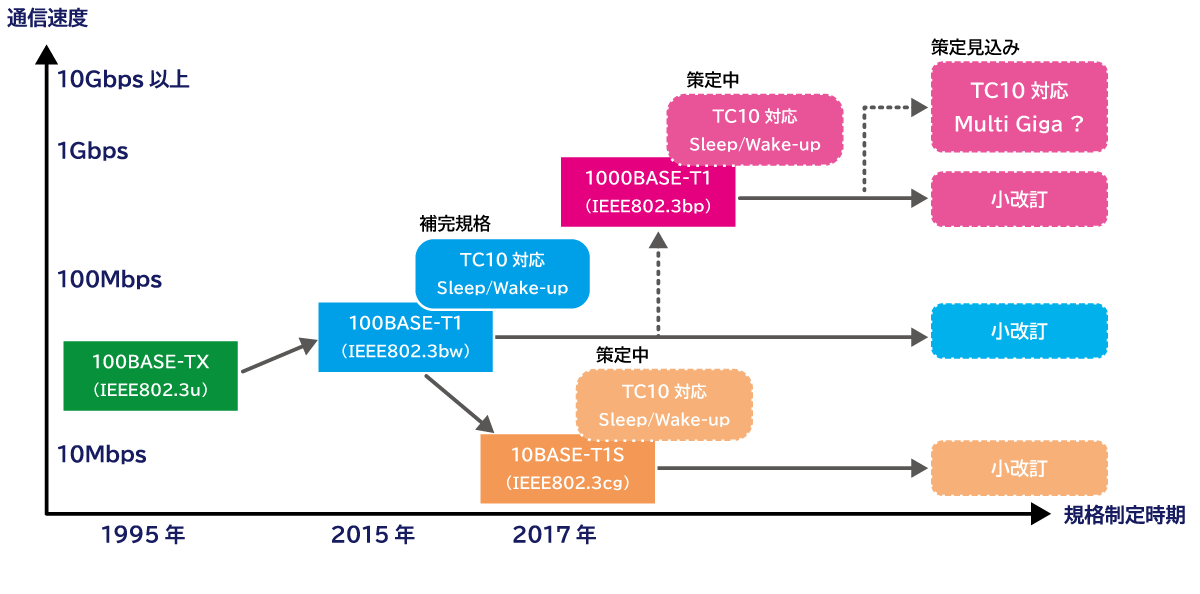
車載Ethernet規格化の状況
車載Ethernetでは、将来の車載ネットワークを見据えて、100BASE-T1より高速な1000BASE-T1(1Gbps、全二重通信)や制御用通信での活用を目指す10BASE-T1S(10Mbps、半二重通信)の規格が策定されています。
自動運転レベル5相当では、自動車のセンサーやカメラからの通信データに加えて、車車間(車と車)通信や路車間(車とインフラ)通信などの通信データが加わります。膨大な通信量を処理にするは、100BASE-T1の100Mbpsの通信帯域では不足することが見込まれます。そのため、1Gbpsの通信速度に対応する1000BASE-T1や、さらに高速なMulti Gigaが議論されています。
また、EVカーになると、電力効率の良いモータ駆動や細かな充電制御のために通信帯域や送信フレームデータ数の拡大が見込まれます。データ数が拡大するとパワートレイン系のネットワークではCANでは賄いきれないため、10Mpbsの通信速度に対応しつつ、CANと同じマルチドロップ型のトポロジーで使用するための10BASE-T1Sが規格化されています。また、補完規格として、OPEN Allianceではスリープ/ウェイクアップ機能をTC10として規格しています。
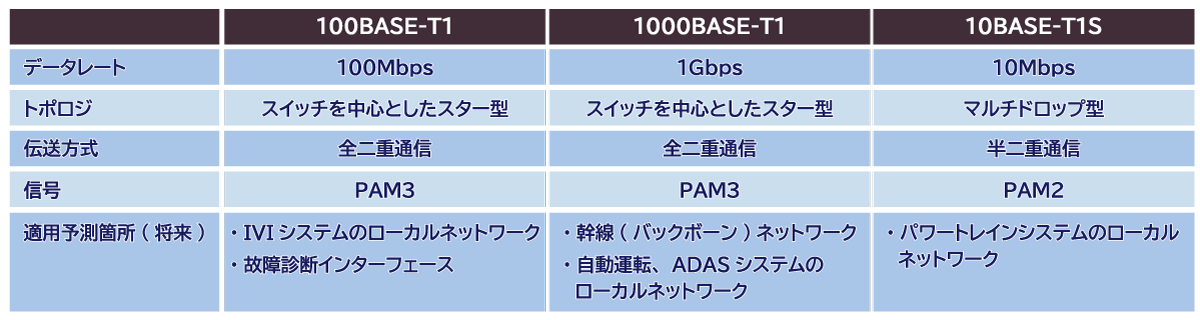
車載Ethernet規格の簡易比較表
Ethernetの構成
Ethernetはコンピュータ間のネットワークを使用した高速通信を行うため、物理層とデータリンク層にあるMAC(Media Access Control)副層を規定した規格です。Ethernet上で動作する通信プログラムであるTCP/IP(Transmission Control Protocol / Internet Protocol)プロトコルスタックは、Ethernet規格の一部と勘違いされることが多いですが、Ethernet規格には含まれません。TCP/IPは、Ethernetの上位層に位置する規格となります。
OSI参照モデルの中での車載Ethernet規格の位置付け
車載Ethernetの上位層
民生Ethernetの上位層のソフトウェアを自動車に応用する場合、以下の課題があります。
- NTP(Network Time Protocol)の時刻同期精度が荒いため、ECU間の協調制御に使えない
- 暗号化によるセキュリティ機能は、CPUリソースを大量に消費するため、応答特性を要求する制御用メッセージに使うことができない
- TCP/IPスタックなどの上位層は、使用するメモリ容量が大きく、CPU負荷が高い
車載Ethernetの上位層が民生Ethernetと異なる点は、車載ECUに使用するマイコンやSoCなどのハードウェアリソースによる物理的な制約(CPU性能、メモリサイズ)と既存Ethernetの上位層では対応できない機能を追加するため、実際に使用する機能のみを実装できるような仕組みにプログラム構造を変えている点になります。
以下は、車載Ethernetの上位層として追加された代表的な機能です。
- gPTP時刻同期機能(IEEE802.1AS)
- メッセージ認証機能(SecOC)
- 故障診断機能(DoIP)
- サービス指向通信(SOME/IP)
Ethernetトポロジ
Ethernetのトポロジはバス型とスター型の2種類があり、バス型では、1本の幹線に複数のノードを接続する形となり、スター型は集線装置(ハブ)に複数のノードを接続する形となります。
バス型はEthernetが規格された初期に採用されていたトポロジで、同軸ケーブルを使ったネットワークで主に使用されます。現在主流のEthernetでは主にツイストペアケーブルを採用したLANケーブルや光ケーブルが使用されるため、スター型のトポロジが主流となっています。
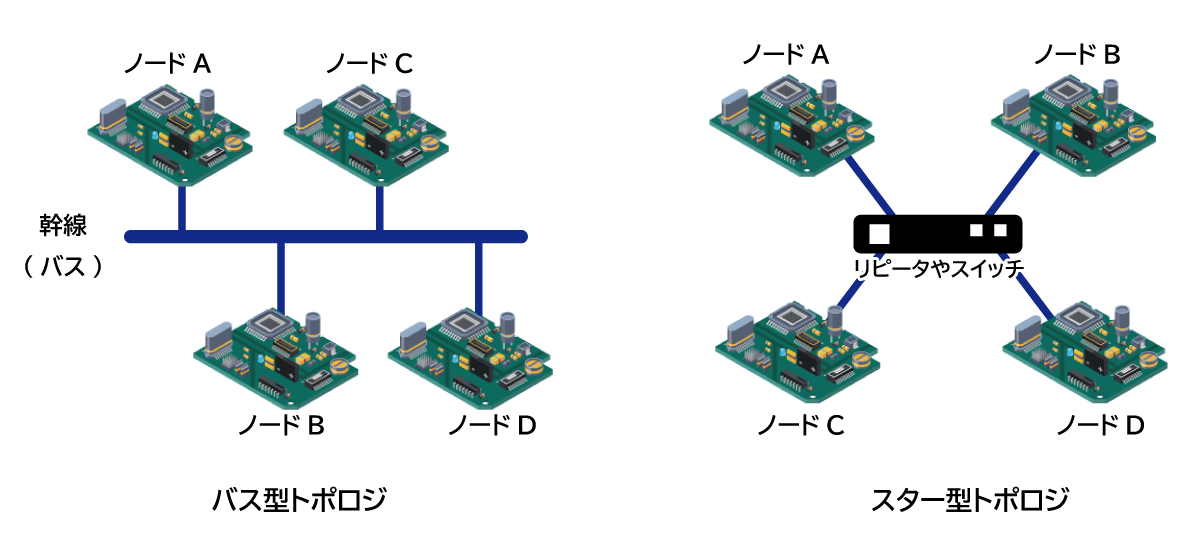
車載Ethernetではスイッチ(中継器)を経由した接続形態が取られています。スイッチ上にはECU接続用のポートが存在し、このポートとECU(ノード)をケーブルで1対1で接続しているスイッチを中心としたスター型トポロジとなります。
また、複数のスイッチを使用する場合のスイッチ間の接続に関しては、故障時のリカバリーを行うことができるリング型トポロジを採用することが多くなることも想定されています。
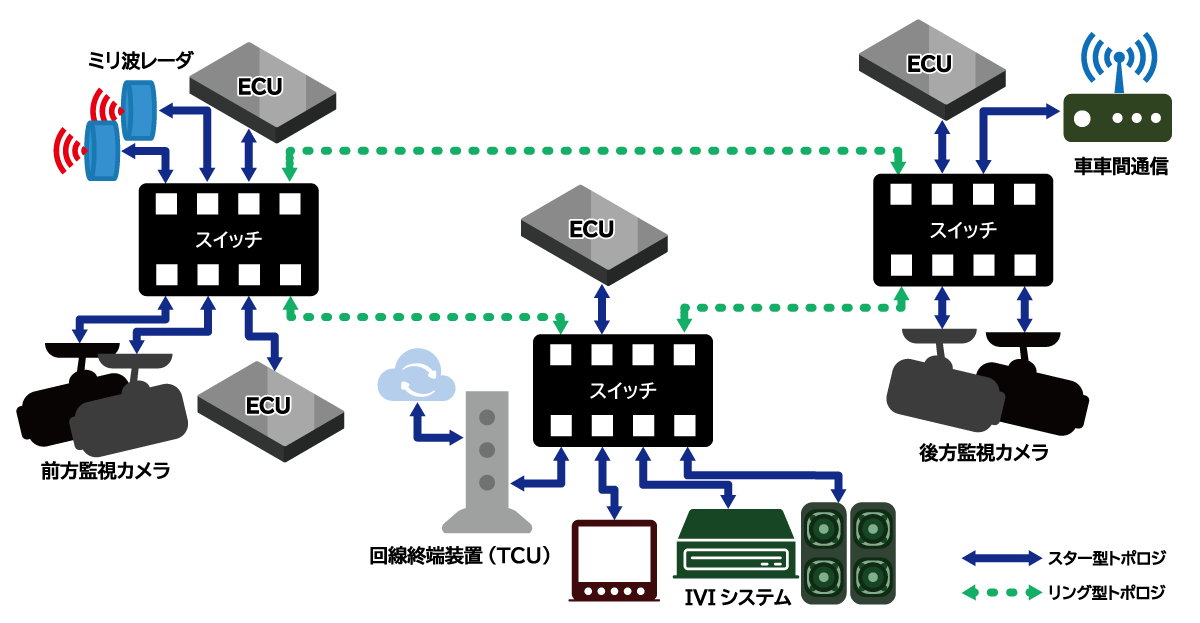
車載Ethernet接続形態例
OPEN Alliance TC10
スリープ/ウェイクアップ
車載ネットワークアプリケーションの標準としてEthernetの導入を後押しする目的でOPEN Allianceという非営利団体が設立されました。車載Ethernetのスリープ/ウェイクアップ機能は、OPEN Allianceにて、TC10という仕様で規定されています。
この仕様でEthernet向けの100BASE-T1がさらに車載用途に特化し、以下の点が改善されました。
- スリープ時のさらなる低電力化
- Wake-on LAN機能の実現
- ハンドシェークによる同期型スリープ機能
TC10が策定される前でもECUローカルでのウェイクアップとスリープ機能はありました。
ただ、従来のスリープ、ウェイクアップは以下の課題がありました。
- スリープは対向側から見るとリンクダウンと区別がつかない。
- スリープ状態にあるリモートのECUを起こすためには、別の信号線が必要。
OPEN Alliance TC10により通信線を用いたリモートウェイクアップ、スリープが可能となりました。
またTC10対応により、非使用時のEthernetネットワークの低電力化の実現が容易になり、選択的なシャットダウンと高速な復帰が可能となったことで、Ethernetを使用したパーシャルネットワークの導入を加速することが出来るようになります。
ただし、TC10は100BASE-T1の標準機能ではないため、TC10に対応した100BASE-T1のPHY同士でなければ、この機能を使うことが出来ません。
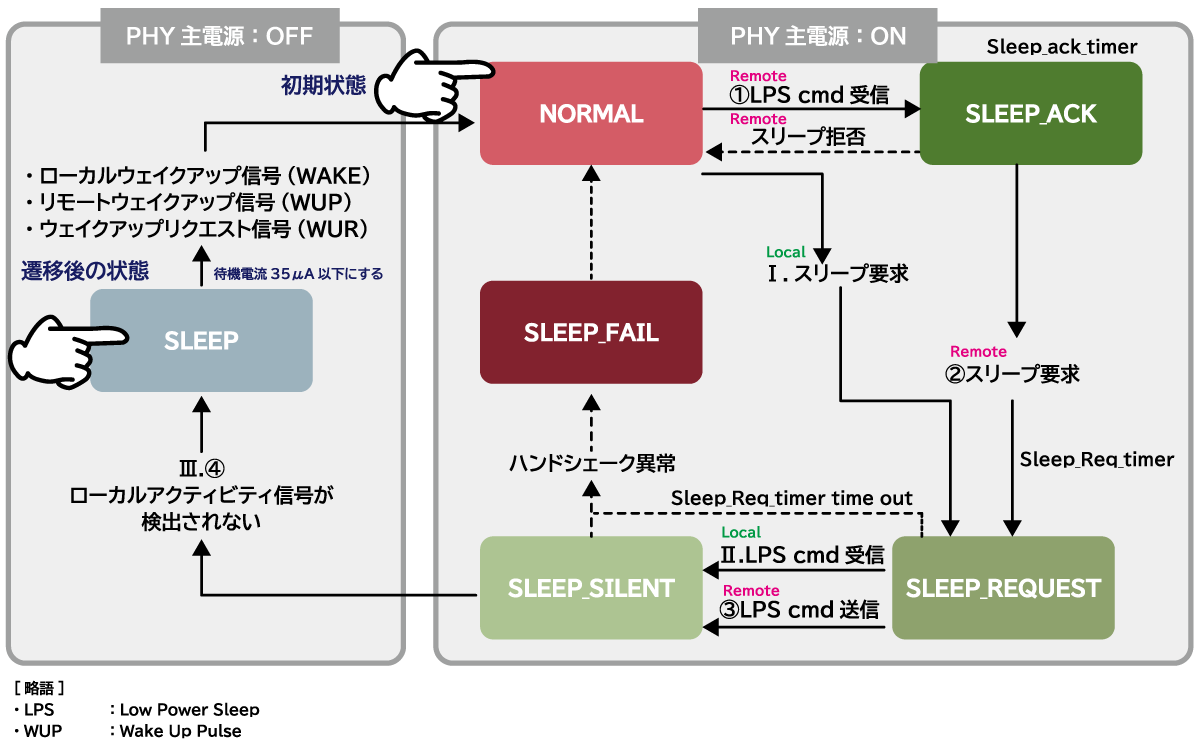
TC10によるスリープ/ウェイクアップモードの遷移
車載Ethernetの活用が期待される領域
将来登場するであろう完全自動運転車に搭載される数多くのセンサーから送り出されるデータ量に対応するためには、数Gbpsもの伝達速度が必要になってくるといわれています。現在、車載ネットワークの制御通信で主に使われているCANの伝送速度は最大1Mbpsで、一度に送信できるデータ量は最大8byteです。CANを高速化したCAN FDにおいても最大伝送速度8Mbps、最大データ量64byteですので、当然賄いきれるものではありません。
今後の自動車は、外の世界とも連携し、大量のデータを車載ネットワーク上の必要としている箇所へ高速に届けることが必要になってきます。そのような中で自動車において車載Ethernetの活躍が期待される領域は、以下のようなものが挙げられます。
- 自動車の幹線ネットワーク(1000BASE-T1+TSN)
- 自動運転、ADAS(先進運転支援システム)のローカルネットワーク(1000BASE-T1+TSN)
- IVI(車載インフォテインメントシステム)のローカルネットワーク(100BASE-T1+AVB)
- パワートレイン系のローカルネットワーク(10BASE-T1S)
- 故障診断インターフェース(100BASE-TX or T1)
ただ、既存の車載ネットワークがすぐに車載Ethernetへ置き換わるわけではなく、技術検証と部分的な適用を繰り返しながら車載ネットワークの最適化が図られていくものと考えられています。
将来の車載Ethernetのネットワーク構成(予測)
車載Ehernet通信をさらに学ぶには
書籍「詳解 車載ネットワーク」のご案内
株式会社サニー技研の当社社員と、株式会社ネットワークマスタ 藤澤行雄氏が共同で執筆した書籍「詳解 車載ネットワーク CAN、CAN FD、LIN、CXPI、Ethernetの仕組みと設計のために」が日刊工業新聞社より販売中。
本Webページでは概要のみのご紹介となりましたが、車載Ethernetの概要からハードウェア、フレームの詳細、通信方法、トレンドなどより詳細な解説をしています。
車載ネットワークを応用したシステムの開発に必要となる開発環境や、ネットワークに関する一般的な技術の解説までを網羅した内容となっています。
目次
1章 自動車の電子化と車載ネットワークの変遷
2章 制御システムECU用高信頼性通信プロコトル CAN
3章 CANの高速化とセキュア対応を目的にした拡張通信プロトコル CAN FD
4章 マンマシンインターフェースECU用低消費電力プロトコル LIN
5章 センサーECU用高速応答プロトコル CXPI
6章 ますます広がる車載Ethernet
7章 車載ネットワークを使った制御のための開発環境
8章 ネットワークに関わる基礎知識
サニー技研の車載Ethernetへの取り組み
サニー技研の車載Ethernet開発の取り組み、開発実績は以下のリンクからご覧ください。