
MicroPeckerXならば、Linux環境でCAN通信、CAN FD通信を手軽に実現できます。
Linux環境でCAN通信、CAN FD通信を実現するための方法として、以下の2つの開発環境をご提供しております。
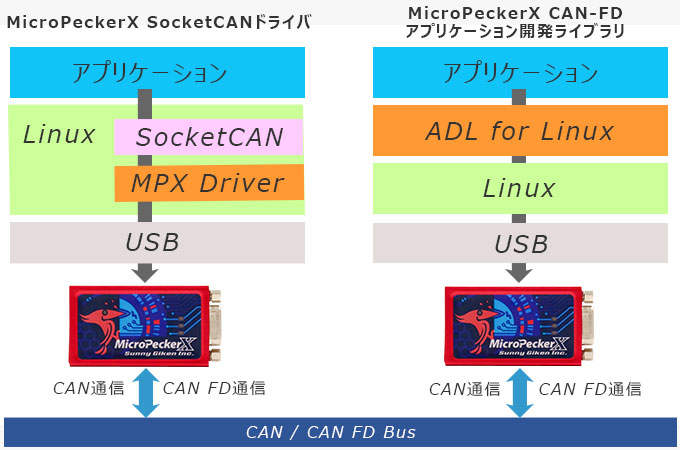
- MicroPeckerX SocketCANドライバ
- MicroPeckerX CAN-FDアプリケーション開発ライブラリ for Linux
MicroPeckerXのハードウェアはWindows対応のものがそのまま使用できます。
Windows,Linuxの両方でMicroPeckerXをご活用ください。
Linux用開発環境をご希望の方へ評価版を無償でご提供いたします。メールフォームからお申込みください。
SocketCANとは
SocketCANは、Linuxカーネル用のオープンソースCANドライバとネットワークスタックのセットです。
サニー技研では、SocketCANのMicroPeckerX用ドライバを開発しました。
SocketCANでは、Linuxのソケット通信のAPIを拡張し、ソケットを介したインターネットプロトコルの使用と同様にCAN通信を行うことができます。そのため、CAN通信を行うプログラムは、TCP/IPなどを用いたネットワークプログラムと同等に記述できます。ダイレクトCAN通信用のrawソケット、ポイントツーポイント接続用のトランスポートプロトコル、CANメッセージの定期送信やメッセージフィルタなどの機能がありますので、Linux環境からCANデータの送受信制御を実現できます。
MicroPeckerX SocketCANドライバ
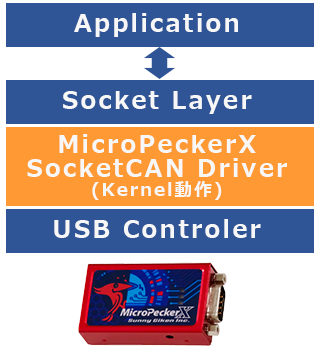
MicroPeckerX SocketCANドライバは、MicroPeckerX CAN-FD Analyzerに対応したSocketCANドライバセットです。MicroPeckerXのCANインターフェースは一般的なSocketCANフレームワークを介してアクセスされます。
SocketCANは、通常のネットワークデバイスと同様に、Socketインターフェースを用いてデータの送受信を行います。SocketCANの場合、CANチャネルはネットワークデバイスとして扱われます。
MicroPecker SocketCANドライバは、Linuxディストリビューションに依存せず、どのLinux OSでも動作します。
SocketCANは多くのLinuxディストリビューションのLinuxカーネルに標準で含まれています。ユーザのLinux環境でMicroPeckerXを使用するためには、MicroPecker SocketCANドライバをMikeコマンドでLinuxカーネルとコンパイルすれば使用可能になります。
SocketCANはKernelレベルで動作するので、様々なLinuxアプリケーションがそのまま使用できます。CAN通信、CAN FD通信を既存のLinux資産と組み合わせて制御できます。
MicroPeckerX SocketCANドライバ動作確認済み環境
MicroPeckerX SocketCANドライバは以下のLinux環境に対応しています。
| 対応カーネル | Ver. 4.xx~Ver 5.xx |
| 動作確認済み環境 | Ubuntu 18.04(64bit) x86 |
| 制限事項 | ビットレート,サンプリングレート固定、ハードウェアタイムスタンプ未使用 |
MicroPeckerX SocketCAN Driverクイックスタートガイド デモ動画
MicroPeckerX SocketCANドライバ 活用事例
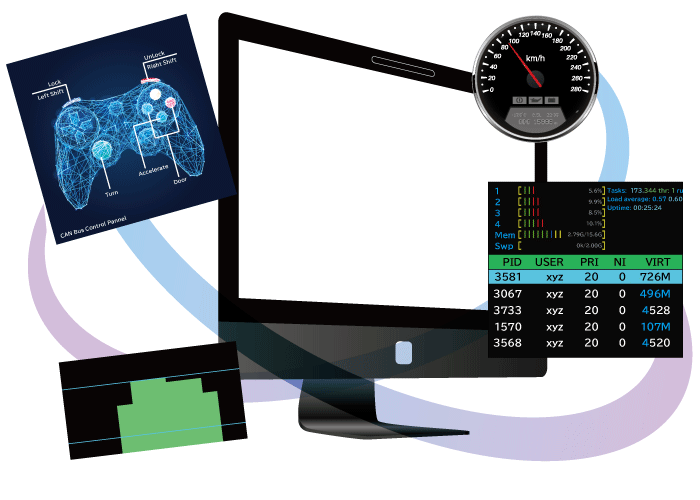
Linuxフリーウェアの活用
Linuxの豊富なフリーウェアを組み合わせて、自由に開発環境や評価環境を構築することが可能です。
Linux-CAN
Linux-CAN / SocketCAN user space applications
ネットワーク・アナライザ・ソフトウェア
フリーウェアを組合わせて開発環境を構築
- SocketCAN対応のGUIモニタソフト
- 簡易モニタソフト
- USBゲームコントローラの情報をCANで送信
- CAN通信上の車速データをメータ表示
- 通信負荷遷移のグラフ化
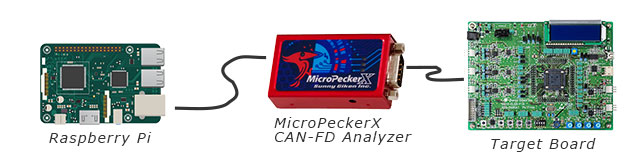
Linux搭載ボードコンピュータのCAN通信/CAN FD通信インターフェース
Paspbery PiなどのLinux搭載ボードコンピュータを使用すれば、PCレスでのCAN通信/CAN FD通信の環境を構築することができます。Linuxアプリケーションで開発したPoCの実環境とのCAN通信評価や、簡易のCANモニタリング機器など、様々に応用可能です。
MicroPeckerX SocketCANドライバ お申込みメールフォーム
無償ダウンロード
MicroPeckerX SocketCANドライバは、MicroPeckerXユーザー向けに無償でダウンロードが可能です。以下のリンクのお申込みメールフォームからご入力ください。
但し、MicroPeckerX SocketCANドライバに対しての技術的な問合わせ対応は含まれません。
MicroPeckerX SocketCANドライバの組込方法など、ユーザーからの技術的な問合わせ対応については、別途有償サポートパックのお申込みが必要になります。
| 製品型名 | 製品名 |
| S810-MX-SKTCD | MicroPeckerX SocketCANドライバ |
MicroPeckerX SocketCANドライバ サポートパック
MicroPeckerX SocketCANドライバの組込み、問い合わせサポート対応は別途有償サポートとなります。
◆サポート内容
- 登録日から1年間の年間サポート
- 最大12件(合計20時間まで)の問い合わせに対応します。
- 電話又は、メールによる組込み方法に関する問合せサポートを致します。
- 問合せサポートに関しては、1週間以内の回答を目途とします。
※緊急対応は含まれておりません。 - MicroPeckerX SocketCANドライバやユーザーアプリケーションのカスタマイズ作業は含まれておりません。
MicroPeckerX SocketCANドライバの年間サポートをご希望の方は、下記の製品型名でお知らせください。
| 製品型名 | 製品名 |
| S810-MX-SKTCD-SPT | MicroPeckerX SocketCANドライバ サポートパック |
Linux対応MicroPeckerX CAN-FDアプリケーション開発ライブラリ
MicroPeckerX CAN-FDアプリケーション開発ライブラリ for Linux
MicroPeckerX向けのLinux開発環境として、MicroPeckerX制御API群をパッケージにしたMicroPeckerX CAN-FDアプリケーション開発ライブラリを無償でご提供しています。
MicroPeckerX SocketCANドライバは、Linuxカーネルで動作し、ソケットを介したネットワークプログラムの開発環境に対して、MicroPeckerX CAN-FDアプリケーション開発ライブラリは、MicroPeckerXを制御するためのAPI群です。APIコールにより、CAN通信/CAN FD通信のデータ取得、データ送信をユーザーアプリケーションから簡単に利用することが可能です。
MicroPeckerX CAN-FDアプリケーション開発ライブラリ for Linuxの詳細は、以下の製品ページをご覧ください。
- Raspberry PiはRaspberry Pi財団の登録商標です。
- Tux Logo Attribution: lewing@isc.tamu.edu Larry Ewing and The GIMP
- SocketCAN Logo Author:Oliver Hartkopp
can-logos LICENSE