MicroPeckerX CAN FDアナライザ《S810-MX-FD2》

システムソフトウェアをVer.3.01にアップデート(2025/11/27)
- 一部の本体が認識されない不具合を修正
- コンポーネントの表示レイアウトを一部修正
- コンフィグコンバータに関する不具合を修正
システムソフトウェアをVer.3.00にアップデート(2025/11/13)
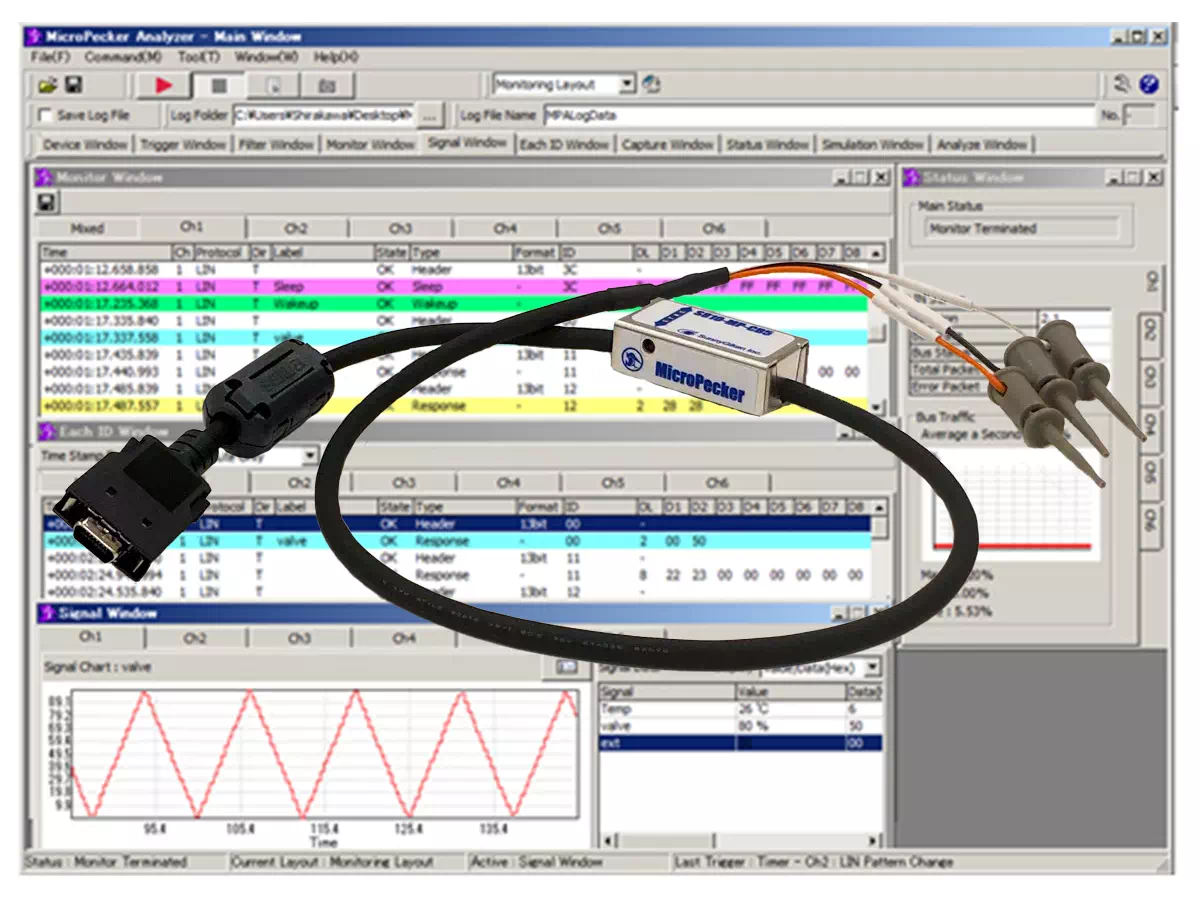
- LINアナライザ、DIO/ADモニタに対応
- ビットレートセグメント等の調整によるボーレートの設定機能を追加
- コンフィグコンバータを追加
- ログエディタを追加
最新版のソフトウェアは、以下の製品ダウンロードページからダウンロードできます。
製品ダウンロード車載ECU開発の複雑化に対応する次世代ツール
現代の車載システム開発が直面する課題
現代の車載システム開発では、従来のCAN通信に加えてCAN FD通信への対応が必須となり、さらに複数チャンネルの同時評価や高精度なタイミング制御が求められています。特にE/Eアーキテクチャの進歩に伴い、ECU間の通信はより複雑で高速になり、開発者は以下のような深刻な課題に直面しています。
開発現場で頻発する問題
- 複数のCAN/CAN FDネットワークを同時に監視・制御する必要があるが、従来ツールでは対応が困難
- ミリ秒レベルでの高精度タイミング制御が要求されるが、既存ツールの精度では不十分
- 大量の通信データを効率的に解析・デバッグする必要があるが、処理能力が不足
- 開発チーム全体で統一されたツール環境が必要だが、高額な導入コストが障壁
- 実車環境に近い条件でのテストが必要だが、再現が困難
MicroPeckerX CAN FDアナライザによる課題解決
MicroPeckerX CAN FDアナライザは、これらの現場課題を根本的に解決し、次世代車載システム開発を強力にサポートします。「開発者一人に一台」のコンセプトで、高性能でありながら導入しやすい価格を実現。チーム全体の開発効率を大幅に向上させ、品質の高い車載システムの開発を可能にします。
MicroPeckerX CAN FDアナライザの特長
手のひらサイズの高性能ツール - どこでも使える開発環境
開発現場での使いやすさを追求
手のひらに収まる小型軽量設計により、限られたデスクスペースでも快適に作業できます。持ち運びも容易なため、開発室、実験室、車両での評価など、様々な場所で同じ環境で作業を継続できます。
PCに依存しない柔軟な運用
ライセンスは本体に登録されているため、使用するPCを選びません。チームメンバー間での共有や、複数の作業環境での利用が簡単です。急なPC故障時も、他のPCですぐに作業を再開できます。
高精度な多チャンネル同期機能 - 最大8chの統合評価を実現
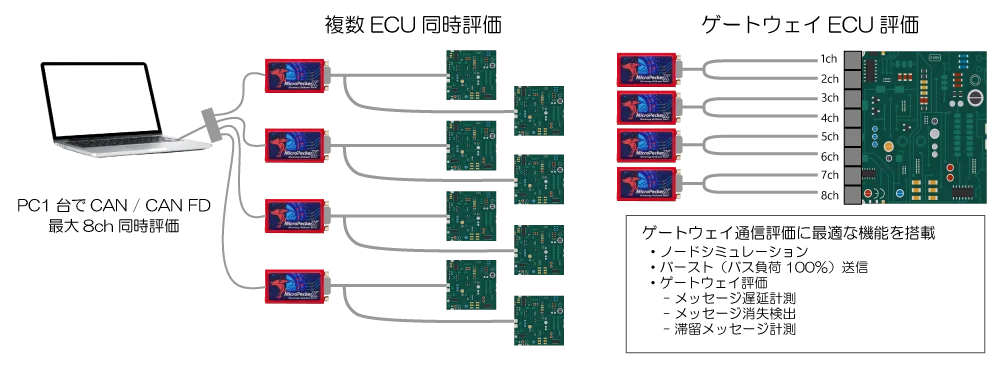
一台で2ch、拡張で最大8chの同時評価が可能
本体1台でCAN通信とCAN FD通信の2ch同時モニタリング・シミュレーションに対応。プロトコルの自動判別により、ユーザーは通信方式の違いを意識せずに使用できます。
拡張性に優れたマルチチャンネル対応
必要に応じて最大4台のMicroPeckerXを同期接続することで、8chまでの同時評価が可能です。近年の車載システムで主流となっている複数ネットワーク構成(CAN、CAN FD、LIN等の混在)にも対応し、システム全体の動作を統合的に監視・制御できます。
ゲートウェイ評価機能で信頼性を保証
ECU間通信の要となるゲートウェイ機能の遅延計測、メッセージ消失検出など、システムの信頼性評価に必要な機能を標準搭載。実車環境での安全性確保に直結する重要な評価が可能です。
高精度0.1msタイミング制御で実現する高品質評価
高精度タイミング制御を実現
送信タイミングの分解能0.1ms(送信時間の保証精度 ±0.2ms)により、実際の車載環境により近い条件でのテストが可能です。特に高負荷状態でのバス評価では、わずかなタイミングのずれが結果に大きく影響するため、この高精度制御が開発品質の向上に直結します。
3つの送信モードで多様な評価シナリオに対応
- スロット送信モード: 標準的な周期送信・イベント送信で基本動作を確認
- ログ再生モード: 取得した通信ログ(最大120万レコード)を再現して詳細検証
- バースト転送モード: バス負荷100%の極限状態での耐性評価
これらの機能により、開発段階から実車に近い条件での評価が可能になり、市場投入後のトラブルを大幅に削減できます。
セキュリティ通信評価(オプション)
従来のCAN/CAN FD通信モニタリングツールは、セキュリティ機能付きの通信データは解析が困難でしたが、専用プラグインによりMAC(メッセージ認証子)とペイロードを自動分離表示。開発者はセキュリティの複雑さに悩まされることなく、効率的なデバッグ作業が可能です。
MicroPeckerX メッセージ認証機能プラグイン
《S810-MX-PM1》
法規制に対応したセキュリティ評価
車載ネットワークの高度化に伴い、従来のCAN通信の脆弱性を狙ったサイバー攻撃が現実的な脅威となっています。国際的な安全規格や法規制でもセキュリティ対策の実装が義務化される中、MicroPeckerX CAN FDアナライザは、オプションの「メッセージ認証機能プラグイン」により、AUTOSAR SecOC準拠のセキュリティ通信評価に対応しています。
本プラグインにより、AUTOSAR SecOC準拠のメッセージ認証機能を評価でき、規制要求を満たす製品開発が可能になります。
MicroPeckerX メッセージ認証機能プラグイン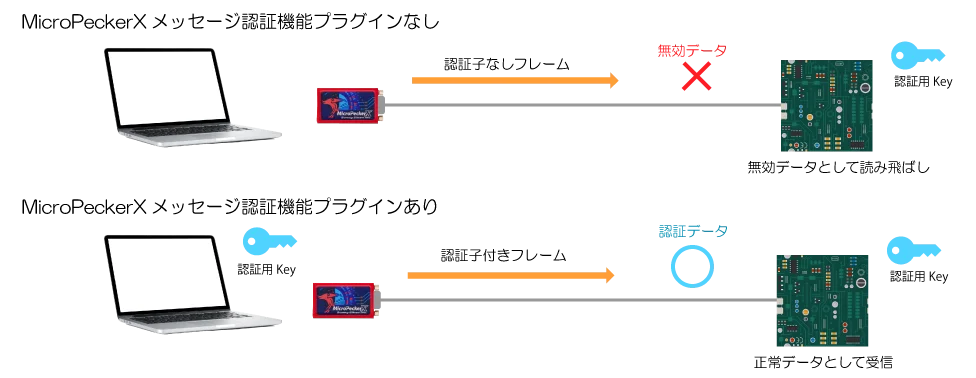
カスタマイズ性とオープン性 - あらゆるニーズに対応
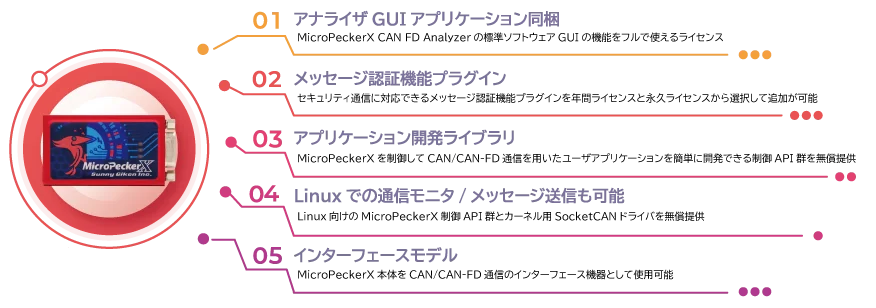
標準GUIから独自ツールまで自由に選択
付属のGUIアプリケーションで即座に作業開始できますが、プロジェクト固有の要件がある場合は、無償提供のアプリケーション開発ライブラリ(Windows/Linux対応)を使用してカスタムツールを構築可能です。
豊富な開発環境サポート
Windows版では、Microsoft Visual C++、C#、Excel VBA など、主要な開発環境に対応したサンプルプログラムを提供。既存の開発フローに容易に組み込めます。
MicroPeckerX アプリケーション開発ライブラリ主要機能詳細
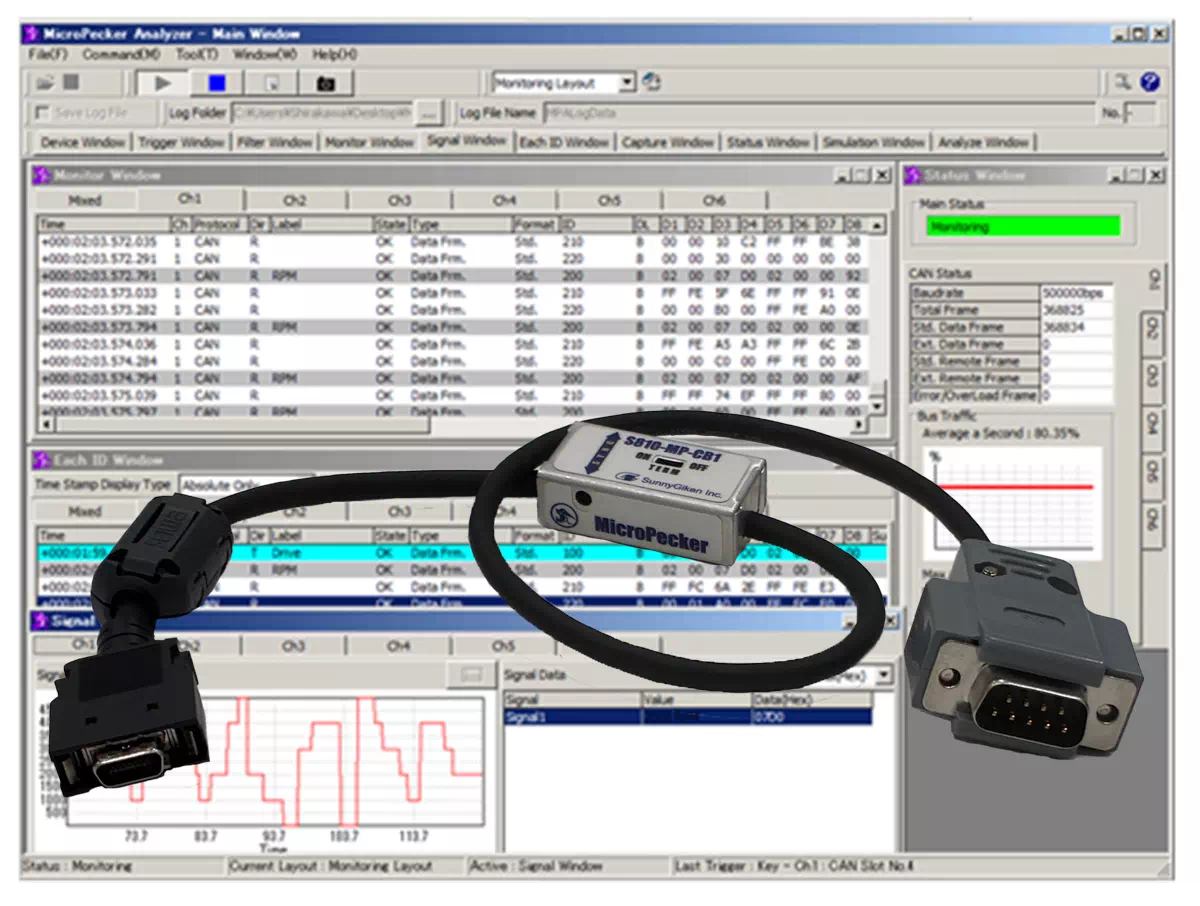
CAN通信、CAN FD通信モニタリング機能
多彩な表示モードで効率的な解析
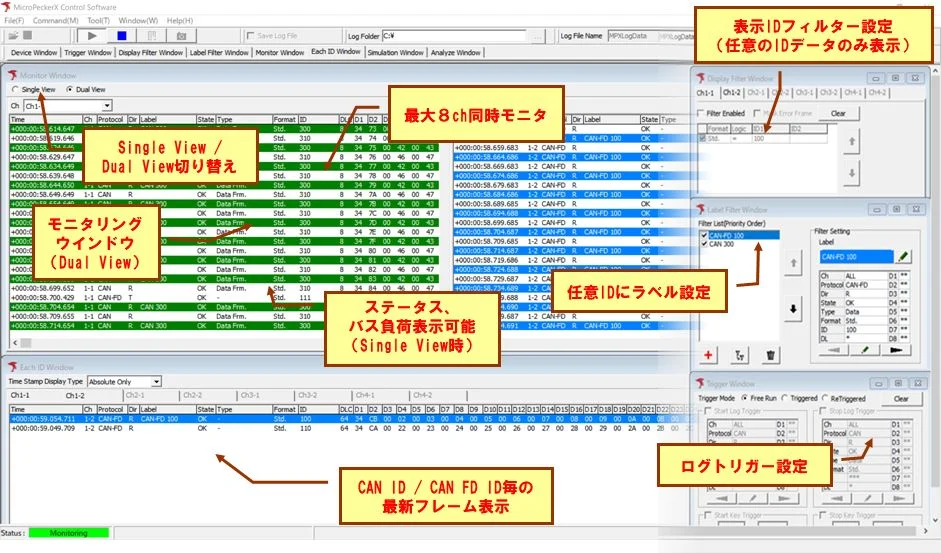
- Single View / Dual View: 用途に応じて単チャンネル集中表示または2チャンネル並列表示を選択
- Each ID機能: CAN IDごとに最新データを整理表示し、特定の通信状況を即座に把握
- 高度なフィルタリング: 必要な情報のみを抽出し、大量データの中から問題箇所を迅速に特定
- ラベル機能: CAN IDに意味のある名前を付けて、直感的な解析作業を実現
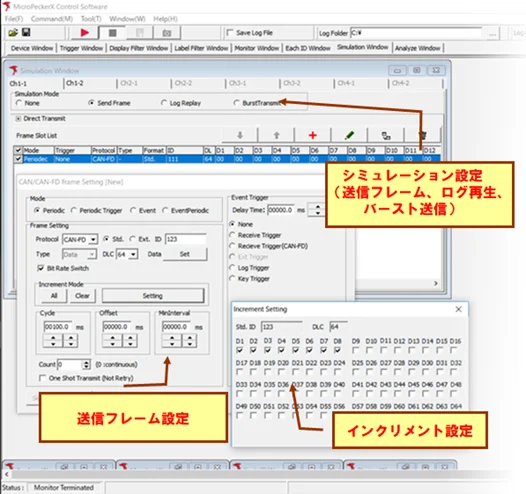
ノードシミュレーション機能
直感的な操作で複雑な送信パターンを設定
| 機能項目 | 概要説明 |
|---|---|
| 送信時間の分解能 | 0.1ms |
| 設定フレーム数 | 28フレーム |
| フレーム種別 | 周期送信、イベント送信、イベント周期送信 |
| 送信周期 | 1ms〜60000msの範囲で設定可能(0.1ms単位) |
| 初回送信オフセット | 0ms〜60000msの範囲で設定可能(0.1ms単位) |
| 送信カウント | 0〜1000回の範囲で設定可能 ※0は制限なし設定 |
| イベント種別 | フレーム受信トリガ、キートリガ |
| イベント検出後の送信Delay | 0ms〜60000msの範囲で設定可能(0.1ms単位) |
| 同一フレームの送信間隔保証時間 | 1ms〜59999msの範囲で設定可能 |
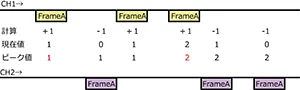
高精度タイミング制御
従来のMicroPecker CAN Analyzer《S810-MP-A1》と比較して送信時間分解能が10倍向上(1.0ms → 0.1ms)。
この精度向上により、高負荷状態でのバス評価における微細な送信タイミング調整が可能になり、実車環境により近い条件での評価を実現できます。
多彩なシミュレーションモード
スロット送信モード - 基本的なECU動作をシミュレート

最大28フレームの送信設定が可能で、実際のECUが行う周期送信やイベント送信を忠実に再現。開発初期段階での基本動作確認に最適です。
ログ再生モード - 実走行データで詳細検証

取得した最大120万レコードのログデータを高精度で再生。
実際の車両から取得したログを利用することで実車環境での問題の再現や、特定のシナリオでの詳細検証が可能です。
バースト転送モード - 極限状態での耐性評価

CAN/CAN FDバスの負荷100%状態を人工的に作り出し、システムの耐性を評価。
市場での予期しない高負荷状況に対する堅牢性を事前に検証できます。
ゲートウェイ解析機能 - システムの信頼性を数値で検証
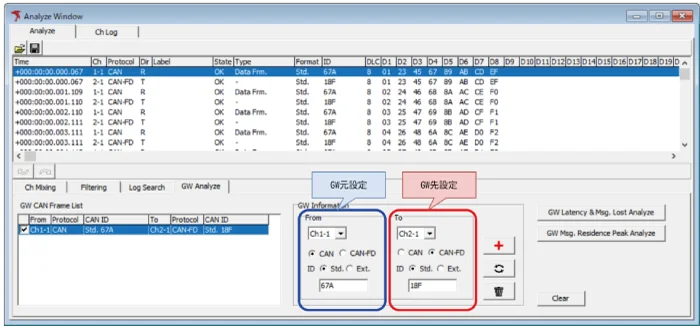
現代の車載システムで重要な役割を果たすゲートウェイECUの性能を詳細に分析。
遅延時間、メッセージ消失、滞留数などを定量的に評価し、システム全体の信頼性を保証します。
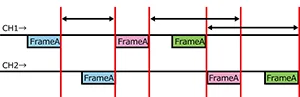
ゲートウェイ遅延計測 - リアルタイム性の保証
ゲートウェイ処理による遅延時間を高精度で計測し、最大値、最小値、平均値を取得。車載システムの安全性に直結するリアルタイム性を数値で保証できます。
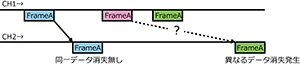
ゲートウェイメッセージ消失解析 - 通信の確実性を検証
重要な制御メッセージの消失を自動検出し、システムの安全性に影響する可能性がある問題を事前に発見。品質保証の観点から極めて重要な機能です。
ゲートウェイ滞留解析 - 処理能力の限界を把握
ゲートウェイ内でのメッセージ滞留状況をモニタし、処理能力の限界や最適化ポイントを特定。システム設計の改善に直接活用できるデータを提供します。
CANアナライザツール製品比較
MicroPeckerX CAN FDアナライザ《S810-MX-FD2》は、従来製品であるMicroPecker CANアナライザ《S810-MP-A1》の後継機種として、すべての面で大幅な性能向上を実現しています。
後継製品:MicroPeckerX CAN FDアナライザ《S810-MX-FD2》

従来製品:MicroPecker CANアナライザ《S810-MP-A1》
| 性能比較項目 | 後継製品《S810-MX-FD2》 | 従来製品《S810-MP-A1》 | 向上効果 |
|---|---|---|---|
| 対応プロトコル | CAN通信 + CAN FD通信 | CAN通信のみ | 次世代規格に対応 |
| 同時チャンネル数 | 2ch(最大8ch、本体4台で実現) | 1ch(最大6ch、本体6台必要) | 効率性2倍向上 |
| 送信タイミング精度 | 0.1ms | 1.0ms | 精度10倍向上 |
| 開発環境サポート | Windows版、Linux版、SocketCANドライバ | Windows版のみ | 開発環境の多様化対応 |
| セキュリティ機能 | メッセージ認証機能プラグインで対応 | 未対応 | 法規制対応 |
| ゲートウェイ機能 | InstaGW(プロトコル変換ツール)として利用可能 | 基本機能のみ | システム統合機能強化 |
Config Convertorで設定ファイルの互換性を確保

設定ファイルの変換やDBCファイルの読込みも簡単
MicroPecker CAN Analyzer《S810-MP-A1》で構築した評価環境も簡単に引き継ぐことができます。
Config Convertorを使用することで、MicroPecker CAN Analyzer《S810-MP-A1》で作成した設定ファイルは、MicroPeckerX CAN FD Analyzer《S810-MX-FD2》用の設定ファイルに簡単に変換できます。
また、DBCファイルを読み込んでCANノードシミュレーションのフレーム設定も可能です。
Config Convertorは、MicroPeckerX Control Softwareのタブメニューから起動できます。
製品仕様
製品パッケージ


| 項目 | 内容 |
|---|---|
| 製品名 | MicroPeckerX CAN FDアナライザ |
| 製品型名 [*1] | S810-MX-FD2 |
| 同梱品 [*2][*3] | ・MicroPeckerX本体 ・USB(microB)ケーブル ・同期ケーブル ・保証書兼解説書 (MicoPeckerX CAN FDアナライザライセンス) |
[*1]:旧パッケージ製品《S810-MX-FD1》と機能に変わりはありません。
[*2]:アプリケーションソフトウェア、ユーザーズマニュアルはWebページからダウンロードとなります。
[*3]:CANケーブルは同梱していません。必要に応じて別途ご購入ください。
機能仕様一覧
| 項目 | 内容 | |
|---|---|---|
| CAN / CAN FDインターフェース | 2ch | |
| 対応チャンネル数 | 2ch/1台、最大8ch(本体4台)までの同時接続可能 | |
| マルチチャンネル同期機能 | モニタタイムスタンプ同期 | 最大8ch(本体4台)間のモニタデータ時刻同期 |
| シミュレーション送信タイミング同期 | 最大8ch(本体4台)間のシミュレーション時刻同期 | |
| ログ再生送信タイミング同期 | 対応 | |
| 通信設定 | プロトコル | CAN / CAN FD 選択可能 |
| 通信ボーレート:アービトレーションフェーズ | 以下の4種類が選択可能 125kbps / 250kbps / 500kbps / 1Mbps | |
| 通信ボーレート:データフェーズ | 以下の5種類が選択可能 125kbps / 250kbps / 500kbps / 1Mbps / 2Mbps / 5Mbps ※アービトレーションフェーズで125kbpsを選択した場合は500kbpsに補正 | |
| サンプルポイント | 以下の6種類が選択可能 60%/65%/70%/75%/80%/85% ※通信ボーレート:データフェーズで5Mbpsを設定した場合は75%に補正 | |
| 終端抵抗 | 有効/無効 選択可能 | |
| モニタ機能 | タイムスタンプ分解 | 1μs |
| ロギング可能容量 | ロギング先のディスクの容量に依存 | |
| トリガモード | フリーラン、開始トリガ、終了トリガ | |
| トリガ条件 | 指定ログ検出、キー入力 | |
| ロギング出力先 | ファイル、ハードディスク内 | |
| ロギング書式 | テキスト形式(CSV)、16進数出力 | |
| シミュレーション送信機能 | 送信時間の分解能 | 0.1ms |
| 送信時間の保証精度 | 0.2ms | |
| 設定フレーム数 | 28フレーム | |
| フレーム種別 | 周期送信、イベント送信、イベント周期送信 | |
| 送信周期 | 0.1ms~60000msの範囲で設定可能(0.1ms単位) | |
| 初回送信オフセット | 0ms~60000msの範囲で設定可能(0.1ms単位) | |
| 送信カウント | 0~60000回の範囲で設定可能 ※0は制限なし設定 | |
| イベント種別 | フレーム受信トリガ、キートリガ | |
| イベント検出後の送信Delay | 0ms~60000msの範囲で設定可能(0.1ms単位) | |
| 同一フレームの送信間隔保証時間 | 0.1ms~59999msの範囲で設定可能 | |
| ログ再生送信機能 | 送信時間の分解能 | 0.1ms |
| 送信時間の保証精度 | 0.2ms | |
| 先頭フレーム送信オフセット | 0.1ms~60000msの範囲で設定可能 | |
| ログ再生開始タイミング | モニタ開始直後、フレーム受信トリガ、ログトリガ、キートリガ | |
| 転送モード | ループあり/なし | |
| 対応チャンネル数 | 最大4ch(1デバイスにつき1ch) | |
| バースト転送機能 | 1フレーム送信 | 対応 |
| ログバースト送信 | 対応 | |
| 転送開始タイミング | モニタ開始直後、フレーム受信トリガ、ログトリガ、キートリガ | |
| 転送モード | ループあり/なし | |
| 対応チャンネル数 | 1ch | |
| ログ解析機能 | ゲートウェイ遅延解析 | ゲートウェイ対象フレームのゲートウェイ遅延時間を計測 |
| ゲートウェイメッセージ消失検出 | ゲートウェイで消失したメッセージの検出 | |
| ゲートウェイ滞留数ピーク値解析 | ゲートウェイ対象フレームをゲートウエイ側で保留したピーク値を計測 | |
| フレーム周期解析 | 特定CAN IDのフレーム周期を計測(Max,Min,Avarage) | |
| 設定情報の保存と読み出し | xml形式で保存 | |
| MicroPeckerとのタイムスタンプ同期 | MicroPecker RAMモニタ、LINアナライザ、CANアナライザとのモニタデータ時刻同期に対応 | |
ハードウェア仕様
MicroPeckerX本体仕様

| 項目 | 内容 | |
|---|---|---|
| ホストインターフェース | USB 2.0 High Speed(480Mbps) | |
| ホスト動作環境[*1] | PC | IBM PC/AT互換機 |
| OS[*2] | Windows 11(64bit), 10(64bit), 8.1(64bit) | |
| CPU | Intel社製またはAMD社製のx86プロセッサ(Core i5/Ryzen5以上推奨) | |
| ハードディスク | 10Gbyte以上の空き容量[*3] | |
| メモリ | 8Gbyte以上を推奨 | |
| USBポート | USB2.0(High Speed)対応で、接続するMicroPeckerX本体の台数分必要[*4] | |
| 画面解像度 | 1920×1080以上を推奨 | |
| その他 | モニタ、キーボード、マウス | |
| 電源 | USB Bus Power(5V、300mA) | |
| 寸法[*5] | 65(W)×35(D)×16(H)mm | |
| 重量 | 45g | |
[*1]:省電力機能を持つPCの場合は、本製品使用中にPCのスリープ、HDDの停止、CPUクロックの低下が発生しないように設定してください。
[*2]:仮想環境での動作は未サポートです。
[*3]:長時間のモニタリングをする場合は、十分なハードディスクの空き容量を確保してください。
[*4]:外付けのUSBハブを用いて接続する場合は、必ずセルフパワー対応機器を選定いただき、外部より電源を供給した上で接続ください。USBハブをバスパワー駆動で接続した場合、動作しない、または不安定になることがあります。
[*5]:寸法には、接続端子の突起部は含まれておりません。
Dsub端子仕様
MicroPeckerX 本体・Dsubコネクタ

| Pin | Function |
|---|---|
| 1 | CAN Lo(CH1) |
| 2 | CAN Lo(CH0) |
| 3 | GND |
| 4 | Not Connected. |
| 5 | Not Connected. |
| 6 | GND |
| 7 | CAN Hi(CH0) |
| 8 | CAN Hi(CH1) |
| 9 | Not Connected. |
オプション製品・拡張機能
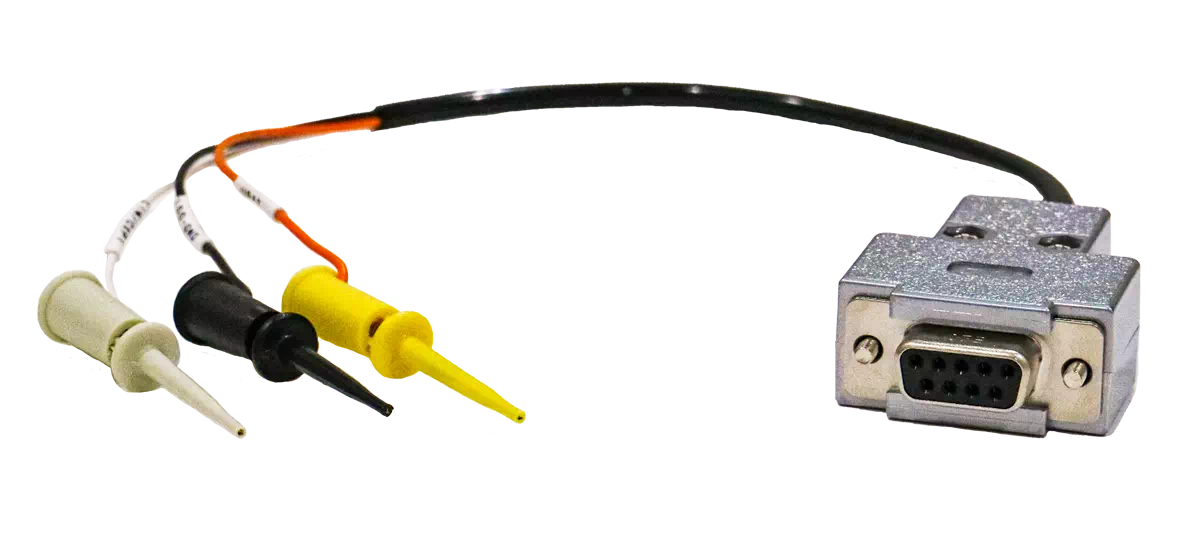
CAN接続ケーブル
CANケーブルは別売りです。用途に応じて以下のケーブルをお選びください。
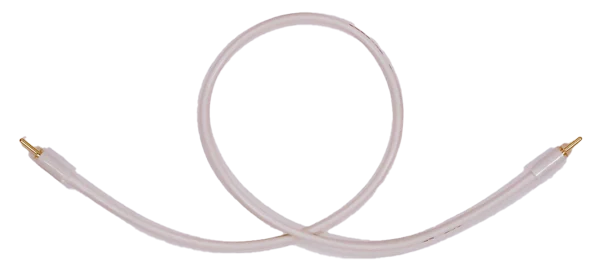
CAN 1ch クリップケーブル《S810-MX-CB1》
ICクリップ式で配線への簡単接続が可能。プロトタイプ評価や配線テストに最適です。

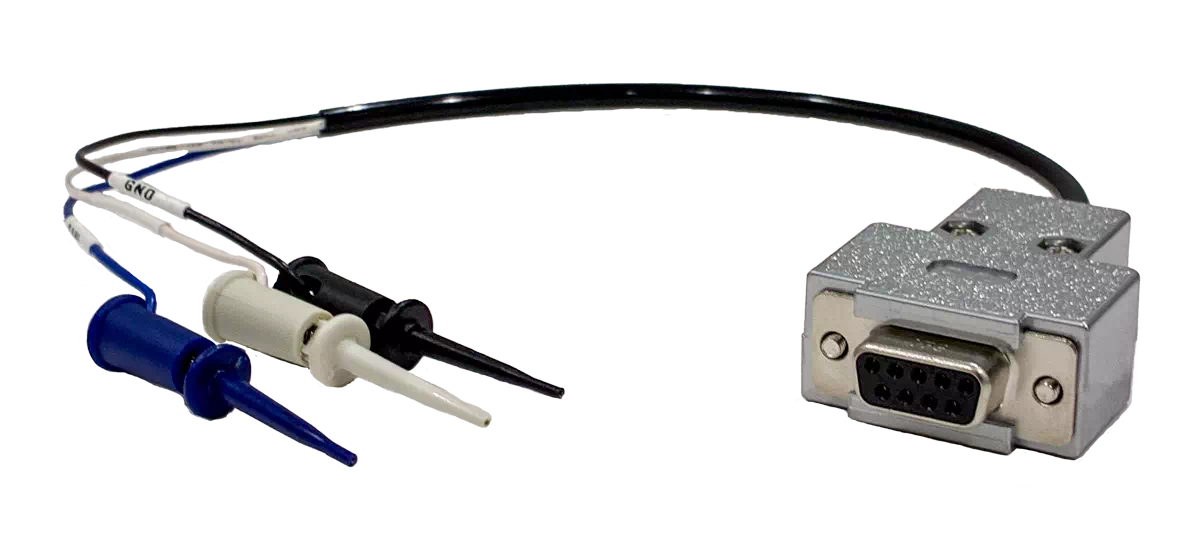
CAN 2ch DSubケーブル《S810-MX-CB2》
2ch分岐型のDsub 9pinケーブル。本格的なシステム評価や長期テストに適しています。
セキュリティ通信評価プラグイン
MicroPeckerX メッセージ認証機能プラグイン《S810-MX-PM1》
自動運転車両の法規制に対応したAUTOSAR SecOC準拠のメッセージ認証機能を追加。MAC(メッセージ認証子)付きCAN/CAN FD通信の評価が可能になります。
次世代車載セキュリティの開発に必須のツールです。
メッセージ認証機能プラグイン詳細カスタムアプリケーション開発環境
車載通信の評価・開発現場では、標準的なモニタリングツールでは対応できない特殊な要件や、独自の評価手法を実装したいニーズが数多く存在します。MicroPeckerXは、こうした現場のニーズに応えるため、ユーザーが自由にアプリケーションを開発できる包括的な開発環境を無償提供しています。
Windows環境向け開発ライブラリ
MicroPeckerX アプリケーション開発ライブラリ for Windows《S810-MX-ADL2N》
Microsoft Visual C++、C#、.NET、Excel VBAなど、主要な開発環境に対応。既存の開発フローに容易に組み込めるよう、豊富なサンプルプログラムを提供しています。
オフィス環境でのデータ解析からリアルタイム制御まで、幅広い用途に対応します。
開発ライブラリ詳細Linux環境向け開発ライブラリ

MicroPeckerX CAN FDアプリケーション開発ライブラリ for Linux《S810-MX-ADL1L》
C++版、Python版のサンプルプログラムを同梱。Raspberry Piでの組み込み評価システム構築や、リアルタイムLinuxでの高精度制御システム開発に最適です。
Raspberry Piを使ったPoC開発や、車載システムの実際の動作環境により近い条件での評価が可能になります。
開発ライブラリ詳細SocketCANドライバ
MicroPeckerX SocketCANドライバ《S810-MX-SKTCD》
Linux標準のSocketCANインターフェースを提供するため、既存のLinuxアプリケーションとの親和性が極めて高く、移植作業を最小限に抑えられます。
実車に近いリアルタイム環境での評価システム構築に最適です。
SocketCANドライバ詳細よくあるご質問
製品に関するご質問
日本語版以外のOSで使用できますか?
日本語版以外のOSは動作保証外です。
英語版マニュアルはありますか?
インストーラに同梱されるのは日本語版マニュアルのみです。英語版はMicroPeckerX マニュアルWebサイトをご参照ください。
製品の貸出(お試し利用)は可能ですか?
はい、可能です。詳しくはこちらをご覧ください。
GUIアプリケーションは、インストール数に制限がありますか?
インストール数の制限は設けていません。
製品のセット内容は?
《S810-MX-FD2》のセット内容:
- MicroPeckerX本体
- USB (microB) ケーブル
- 同期ケーブル
- CAN/CAN-FDアナライザ用GUIソフトウェア
CANケーブルは別売です(《S810-MX-CB1》《S810-MX-CB2》など)。
CANアナライザでバスオフが発生した場合は、どんな動作になりますか?
バスオフ検出後は回復シーケンスを経ずに即エラーをクリアし、通常状態へ戻ります。
CANケーブルのCANバス側コネクタの仕様は?
- CAN 1ch クリップケーブル:CAN-Hi/CAN-Lo/GND の各端子が独立したクリップ。
- CAN 2ch D-sub ケーブル:D-sub 9ピン。
ほかのコネクタで利用する場合は変換が必要です。D-sub側にクリップケーブルを接続して変換することもできます。
MicroPeckerXとターゲットとの間で通信を行うことは可能ですか?
ACKを返す機能を備えているため接続だけで受信確認ができます。最大28フレームを事前登録して送信できるほか、任意IDでの送信やログ再生シミュレーションも可能です。
CANアナライザのシミュレーション機能で、スクリプト言語を使用することは可能ですか?
スクリプトには対応していませんが、「MicroPeckerX アプリケーション開発ライブラリ for Windows《S810-MX-ADL2N》」を利用することで任意の送信アプリを開発できます。
CANアナライザのシミュレーション機能で、特定のフレームやデータを一定周期で連続送信できますか?また、送信中に値を変更できますか?
スロット送信モードで特定IDのCANフレームを指定周期で送信できます。送信中のデータ変更も可能です。
CANアナライザに終端抵抗は入っていますか?
内蔵終端抵抗(124Ω)があり、GUIアプリの「Device Setting」から「Terminator Enabled」で有効化できます。初期状態では無効の設定です。
CANアナライザでエラーフレームの検出や生成は可能ですか?
Ackエラーやオーバーロードフレームなどの検出は可能ですが、エラーフレームの生成機能はありません。
MicroPeckerとの時刻同期を行わせることはできますか?また、双方のデータを同じグラフ上で表示できますか?
時刻同期は可能ですが、GUIアプリが異なるため同一グラフ表示はできません。ログのタイムスタンプは同期しています。
トラブルシューティング
CAN-FD通信を開始すると『Stuff Error』などが表示されます。
通信相手が「Non-ISO CAN FD」を使用している可能性があります。対象機器を「ISO CAN FD」に設定してご利用ください。
アナライザ開始時に『Monitor Synchronization error.』が表示されます。
同期ケーブルが確実に接続されているか確認してください。改善しない場合は故障の可能性があります。
特定IDだけをログに保存したり、IDごとに分割保存できますか?
すべてのIDを保存する仕様ですが、以下の手順で必要なIDのみを抽出できます。
- 「Analyze Window」でログを読み込み「Analyze」タブを開く。
- 「Filtering」タブで「Get ID List」を実行し、保存したいIDにチェックを入れる。
- 「ID Filtering」を選択して「Execute」で絞り込み、保存ボタンで出力する。
IDごとにファイルを分けたい場合は、対象IDを切り替えて同手順を繰り返してください。