サニー技研では、ハードウェアとソフトウェアの両方が出来る強みを生かし、これまでに次世代技術の様々な研究開発を推進しています。 自動車の車載ECUに求められる車載ネットワーク技術、AUTOSAR、機能安全、モータ制御技術など、トレンドを先取りした研究が今日のサニー技研の技術基盤になっています。





車載通信ネットワーク・AUTOSAR
今日におけるサニー技研の高品質な車載通信ソフトは、これまで積み重ねてきた先行研究開発が基盤になっています。
サニー技研ではいち早く車載ネットワークの多重化、マイコン統合ためのソフトウェアプラットフォーム化を手掛けており、経済産業省 平成17年度地域新生コンソーシアムにおいては、「自動車統合制御用組込みOSの開発」として、名古屋大学、自動車メーカー、サプライヤーなどと共同でCAN、LINミドルウェアを開発し、その成果はTOPPERSプロジェクトから公開しています。
その他にもJASPAR国家プロジェクト推進ワーキンググループにおける「高信頼組込みソフトウェア開発」においては、JASPAR版BSW(Basic Software)の開発と実証検証に参画。名古屋大学のコンソーシアム型共同研究においては、マルチコアAUTOSAR OSのATK2カーネル開発や次世代のAUTOSARソフトウェアプラットフォーム創りを手掛けています。
今後、車載ネットワークにおいてもEthernetを導入していく方向になりつつあります。CAN、LINのこれまでのネットワークだけでなく、Ethernetの導入で更なる多量のデータを高速に伝送できるメリットをもたらします。
また、車載ネットワーク通信で主流となっているCAN通信規格を拡張したCAN FD(CAN with Flexible Data-Rate)も今後注目されることでしょう。CAN FDは従来のCANのフォーマットを拡張し、これまで8バイトまでのペイロード(データフィールド)から最大64バイトまでのペイロードサイズに拡大されます。通信速度もこれまでCAN通信では1MbpsがMAXでしたが、CAN FDでは1Mbps以上の高速な通信の期待も高まっています。
サニー技研は、車載ネットワークソフトウェアの開発実績を元に、新しい潮流になるであろう技術にもいち早く取り組んでいます。
主な研究活動
- 経済産業省 平成17年度地域新生コンソーシアム研究開発事業 採択研究
「自動車統合制御用組込みOSの開発」 - 経済産業省 平成18年度戦略的基盤技術高度化支援事業
「機能安全対応自動車制御用プラットフォームの開発」 - 経済産業省 平成19年度~21年度産業技術研究開発委託費(産学連携ソフトウェア工学実践事業)
「高信頼組込みソフトウェア開発」

- 平成23年~25年 名古屋大学 大学院情報科学研究科 附属組込みシステム研究センター(NCES)
次世代車載システム向けRTOSの仕様検討及び開発に関するコンソーシアム型共同研究(略称、ATK2コンソーシアム) - 平成26年~ 名古屋大学 大学院情報科学研究科 附属組込みシステム研究センター(NCES)
車載制御システム向け高品質プラットフォームに関するコンソーシアム型共同研究(略称、APコンソーシアム)
モータ制御ソフトウェア技術・評価環境
EV/HV/PHV自動車ではモータ制御が重要なウェイトを占めるようになっています。現在主流となっているモータはレアアース(希土類元素)としてネオジム、ジスプロシウムを永久磁石として採用した永久磁石式同期モータです。レアアースは永久磁石を採用することで協力な磁石を形成することが可能であり、今日の電気自動車の性能は、この永久磁石に依存するところが大きいと言われています。しかしながら、永久磁石式同期モータは高回転時の発熱、逆起電力の発生による動力ロスなど大きな課題もあります。これらの問題を解決するため、今、レアアースレスモータが注目されています。
サニー技研は名古屋工業大学、匠ソリューションズ等とともにレアアースレスモータ制御技術を確立するために経済産業省 平成23年度 戦略的基盤技術高度化支援事業に「レアアースレスモータ制御のためのソフトウェア実装研究」を提案し採択されました。この研究では名古屋工業大学・小坂教授が開発された永久磁石を全く使用しない「巻線界磁形フラックススイッチングモータ」を対象に、モータ制御のためのハードウェア、ソフトウェアそしてモータ制御をすべてハードウェアで実現するためのFPGA IPを開発しました。
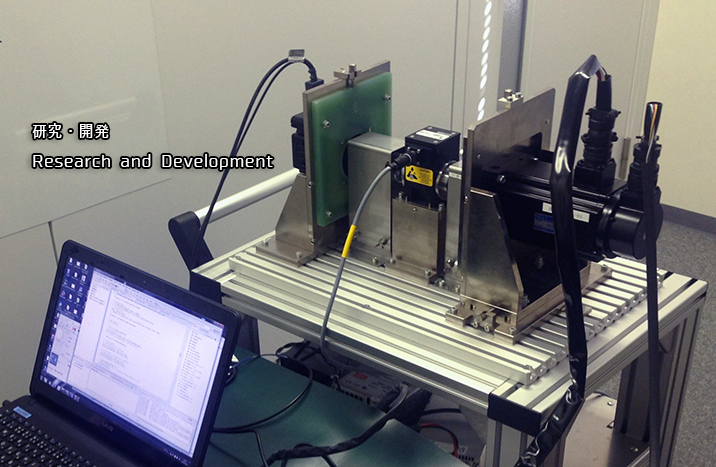
またモータ制御の開発支援のために、モータ制御ソフトウェア~マイコンを含めたシステム系をPC上でシミュレーションする仮想化開発システムやモータの電気的特性を模擬するモータ模擬ボード、モータ制御のデバッグのための高速RAMモニタを開発することにより、単にモータ制御ソフトウェア開発をすることにとどまらず、開発のためのプロセスをサポートするための環境構築にも力を入れています。
「巻線界磁形フラックススイッチングモータ」は他のレアアースレスモータとして期待されているSRモータ、SynRモータ、誘導モータ等と比べて、従来の永久磁石式同期モータの制御の延長で制御ができることから、制御アルゴリズムをレアアースレスモータだけでなく、従来の永久磁石式同期モータにも簡単に適用できることがメリットです。
サニー技研はこの研究成果をさらに発展させ、従来モータ、新モータの制御に必要なソフトウェア、IP提供ならびに、仮想システム、モデルの提供、そして評価用ハードウェア、デバッグ用ツールの提供を推進していきます。
主な研究活動
- 経済産業省 平成23年度戦略的基盤技術高度化支援事業 採択研究
「レアアースレスモータ制御のためのソフトウェア実装研究」

機能安全
複雑化した電子制御を組合せ、不具合なく機能させるためには、電子システムの信頼性だけでなく安全性にも注意を払う必要があります。そのために電子制御システムは、今日ISO26262、AutomotiveSPICEに従った開発が必須となっており、規定されたプロセスに従い開発を進めて不具合の混入を未然に防ぐことが求められています。
開発ソフトウェアの信頼性を証明するためには、要求仕様から設計・実装・評価までの仕様のトレーサビリティが取れていることを証明し、システムを分析してどこにリスクが存在するのか、そのリスクをどのように回避するかなどを開発時にケアしていく必要があります。
サニー技研はISO26262の前身のIEC61508仕様をベースとした機能安全研究を経産省の平成18年度 戦略的基盤技術高度化支援事業において、名古屋大学、産業技術総合研究所、名古屋市工業研究所、自動車メーカ、自動車部品メーカ等とともに研究参画し、機能安全のためのソフトウェア開発技術を車載ネットワークCAN、FlexRayのミドルウェア開発を通して得てきました。この研究の中ではCAN、FlexRay通信ミドルウェアのの安全分析を実施しています。
その後、ISO26262の発表と同時に、ISO2626の機能安全に向けた開発プロセスや組織作りを産業技術総合研究所、名古屋市工業研究所等の指導のもとに推進しています。その成果の一部はJAXA クリティカルワークショップでの発表、組込みシステム形式手法研究会での活動を通じて公開しています。
JAXAクリティカルワークショップでの発表活動
組込みシステム形式手法研究会(名産研)
経産省サポイン
主な研究活動
「機能安全対応自動車制御用プラットフォームの開発」
車載ECU評価ツール開発
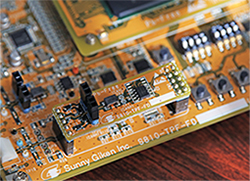
肥大化するECU開発に先駆け、ECUのテスト・適合評価支援のためのツール開発を、経済産業省平成21年度 戦略的基盤技術高度化支援事業へ「一線式デバッグインターフェースの組込み開発」として提案し採択されました。この研究開発事業で開発された製品がMicroPeckerになります。
MicroPeckerは自動車におけるネットワーク通信テスト、ECUテスト・評価を目的に小型軽量で1つのインターフェースを多目的用途で使用できることをコンセプトにした画期的なツールです。設計段階から外部アドバイザーとして、半導体メーカー、自動車メーカー、サプライヤー、大学、研究機関から様々なご意見を頂きながら開発してきました。
MicroPeckerを使用することで開発ECUの動作検証においてRAMモニタ機能を用いることが可能になります。RAMモニタはターゲットプログラム実行中に複数のRAMデータをトレースし、プログラムの状態遷移の記録が可能です。取得したログデータはプログラムの信頼性検証として機能安全に必要なエビデンスとしてもご利用になれます。
MicroPeckerはRAMモニタ機能以外にもケーブルとソフトウェアを入れ替えることで、CANバスアナライザ、LINバスアナライザに変更ができるため、車載開発のデバッグ~テスト・評価工程におけるあらゆる場面で1つのツールとして活用が可能です。
主な研究活動
- 経済産業省 平成21年度戦略的基盤技術高度化支援事業 採択研究
「1線式デバッグインターフェースに対応した組込みソフトウェア支援ツールの開発」 - 平成24年度ものづくり中小企業・小規模事業者試作開発等支援補助金 採択研究
「車載組込みソフトウェア開発に対応した高信頼データロガーの試作」

車載セキュリティ
自動車におけるネットワークの多様性が今後広がりを見せる中、セキュリティについても対策が必要になっています。
今日の自動車ではECU間の通信にCAN通信が主に用いられていますが、現在のCAN通信のほとんどは平文で送受信されるため、そのCANデータを解析することにより、自動車のコントロールをCAN経由で自由に行うことも可能です。CAN制御で可能なコントロールによっては人命にかかわるような重要な内容も存在するため、悪意のある人物がCAN通信をハッキングすることで、ドライバーに危険をもたらす可能性も否定できません。またCAN通信情報をモニタリングすることでドライバーのプライベートや行動を知ることができるなど、情報社会にもたらす影響も懸念されています。
そのため、自動車のECUが取り扱うあらゆる通信や取り扱うデータを暗号化するなどのセキュリティ対策を施されることが検討されています。暗号化は信頼性のあるアルゴリズムによりデータ暗号を実施する必要がありますが、共通鍵のDES, Triple-DES, AES, Camellia, IDEA, RC5, Misty、公開鍵のRSA、Diffie-Hellman、El Gamalなどが世界的に知られています。
しかし暗号化のためのソフトウェアの処理負荷は大きく、暗号モジュールをハードウェア化したものを搭載するなどの課題もあります。また運用方法なども考慮しないと、使い勝手、安全性などにおいても影響が考えられます。
今後、ITS、V2G(ビーグル・ツー・グリッド)、M2M、クラウドサービスの導入、またEthernetが導入されると、その取り扱うデータ量や内容も増加することから、より一層セキュリティ対策は重要になってくることが考えられます。
サニー技研では、次世代車載通信規格のCAN FDやCXPIにもいち早く取り組んでいます。従来のCAN通信では1メッセージあたり8バイトデータの送受信ですが、CAN FD通信では、1メッセージあたり最大64バイトのデータを送受信することが可能です。そのためセキュリティコードをCAN FDメッセージに載せるなど、今後の活用が見込まれています。